





В данной работе исследуется метод синхронизации несущей задающих генераторов, разнесённых в пространстве, требования к системе синхронизации, рассматривается работа системы фазовой автоподстройки частоты.
Key words: synchronization methods, phase synchronization.
Актуальность
В настоящее время точная фазовая синхронизация синхросигналов или сигналов гетеродина в распределенных системах является постоянным требованием при проектировании широкого спектра систем с приложениями в телекоммуникациях и, например, в фазированных антенных решетках. Выполнение этого требования является сложной задачей, когда расстояние между подсистемами велико с точки зрения длины волны и, в частности, когда это расстояние изменяется во времени.
Синхронизация фазы несущей является наиболее важной задачей для реализации распределенных систем формирования луча и оптимизации их энергетической эффективности. В то же время фазовая синхронизация имеет решающее значение для реализации распределенных (бистатических / мультистатических) радиолокационных систем [1].
Целью данной работы является разработка методики синхронизации пространственно разнесенных устройств. Для этого необходимо:
− Получить аналитическое выражение фазового смещения сигналов, генерируемых генераторами, разнесёнными в пространстве;
− Разработать алгоритм автоматической подстройки фазы;
− Оценить влияние пространства на систему синхронизации.
Описание системы
Основным требованием задачи синхронизации является синхронизация обоих разнесённых генераторов. Одним из возможных методов является фиксация одной частоты относительно другой. Эта операция может сочетаться с компенсацией сдвига фазы. Подобная схема изображена на рисунке 1. Схема состоит из двух блоков, ведущее и ведомое устройство (центральный и удаленный блок), распределенных на растоянии d друг от друга.
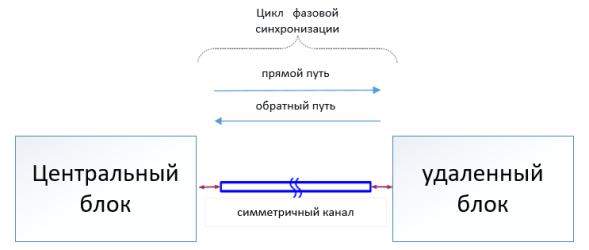
Рис. 1. Синхронизация частоты и фазы несущей между двумя генераторами
Этот метод работает при условии, что канал симметричный. Это означает, что свойства канала идентичны для обоих направлений распространения. Таким образом, задержки распространения и сдвига фазы (φd) для заданной несущей частоты будут одинаковым в обоих направлениях. В соответствии с этим предположением, если фазовые сдвиги туда и обратно могут быть измерены, то можно найти способ разделения этих измерений.
Опорный несущий сигнал может быть сформирован в центральном блоке, как синусоидальная функция времени t с заданной частотой ω0 и фазой φ0 в виде
![]() .
.
Этот сигнал распространяется в пространстве с постоянной скоростью в точку, находящуюся на расстоянии d от центральной точки. Таким образом, сигнал в точке наблюдения будет
![]() ,
,
где λ — длина волны.
Поэтому задача синхронизации несущей для измерения разности фаз φd и компенсации её в удалённой точке заключается в использовании двух частот, полностью синхронизированных по фазе.
Тем не менее, проблема усложняется, когда расстояние между двумя точками велико и не может быть определено непосредственно. Фазовое смещение будет также неизвестно, даже если есть способ, чтобы точно измерить расстояние.
Поэтому были предложены методы, чтобы решить эту проблему. Эти системы, работая с обратной связью, измеряют и компенсируют фазовые ошибки несущего сигнала. В каждом блоке сигнал на выходе генератора поступает в систему фазовой автоподстройки частоты, которая сравнивает и корректирует начальную фазу своего опорного генератора.
Система фазовой автоподстройки частоты
Фазовая автоподстройка частоты (ФАПЧ, англ. Phase Locked Loop) — система автоматического регулирования, подстраивающая фазу управляемого генератора так, чтобы она была равна фазе опорного сигнала, либо отличалась на известную функцию от времени. ФАПЧ сравнивает фазы входного и опорного сигналов и формирует сигнал ошибки, соответствующий разности между этими фазами. Сигнал ошибки проходит далее через фильтр низких частот и используется в качестве управляющего для генератора, управляемого напряжением (ГУН), обеспечивающего отрицательную обратную связь. Если выходная частота отклоняется от опорной, то сигнал ошибки увеличивается, воздействуя на ГУН в сторону уменьшения ошибки. В состоянии равновесия выходной сигнал фиксируется на частоте опорного [2].

Рис. 2. Структурная схема системы ФАПЧ
Работа схемы ФАПЧ
Схемы ФАПЧ используются в передатчиках и приемниках, при аналоговой и цифровой модуляции, а также при передаче цифровых сигналов. Схема ФАПЧ позволяет обеспечить точную настройку, частотную селекцию и фильтрацию без использования громоздких элементов фильтров, используемых в схемах детектирования. ФАПЧ представляет собой систему управления с петлей обратной связи, в которой параметрами регулирования являются частота или фаза сигнала. Структурная схема петли ФАПЧ (рис. 3.) содержит три основных блока:
− фазовый компаратор или фазовый детектор (ФД)
− петлевой фильтр (фильтр низких частот, ФНЧ)
− генератор, управляемый напряжением (ГУН)
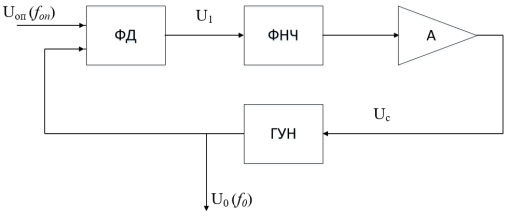
Рис. 3. Структурная схема петли ФАПЧ
ФД (или детектор ошибки) сравнивает фазы сигнала опорного генератора Uоп и выходного сигнала ГУН U0 и вырабатывает напряжение U1, величина которого зависит от разности фаз этих сигналов. Если эта разность равна ![]() радиан, то выходное напряжение ФД будет определяться выражением,
радиан, то выходное напряжение ФД будет определяться выражением,
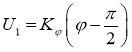 , (1)
, (1)
где ![]() — коэффициент передачи «фаза — напряжение» ФД.
— коэффициент передачи «фаза — напряжение» ФД.
Выходное напряжение ФД пропускается через ФНЧ для подавления высокочастотных составляющих и комбинационных частот, которые присутствуют в опорном сигнале и на выходе ГУН. Напряжение с выхода ФНЧ усиливается и используется как управляющее для ГУН (UC). Величина его вычисляется по формуле:
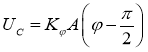 , (2)
, (2)
где A — коэффициент усилителя. Такое управляющее напряжение обеспечивает изменение частоты ГУН по отношению к частоте его собственных колебаний ![]() до уровня:
до уровня: ![]() (3)
(3)
где ![]() — коэффициент передачи «напряжение — частота» ГУН.
— коэффициент передачи «напряжение — частота» ГУН.
Когда осуществлен захват опорного сигнала ![]() схемой ФАПЧ, справедливо равенство:
схемой ФАПЧ, справедливо равенство: ![]() , (4)
, (4)
Поскольку согласно (3)
Получим: 
Таким образом, если схема ФАПЧ захватила опорный сигнал, то сдвиг по фазе между этим сигналом и выходным сигналом ГУН устанавливается равным ![]() , и две частоты
, и две частоты ![]() и
и ![]() будут точно синхронизированны.
будут точно синхронизированны.
Моделирование ианализ результатов
В данном разделе рассматривается одночастотная схема синхронизации в удаленном блоке, где принимается сигнал от центрального блока со сдвигом фазы, в значительной степени определяющий зависимость ошибки по фазе от частоты среза ФНЧ, и точность синхронизации всей схемы.
Для моделирования фазового детектора и оценки реализуемости метода синхронизации в среде Simulink MATLAB [3] была разработана имитационная модель схемы (рис. 4). Опорный сигнал от генератора центрального блока моделируется с помощью блока вычисления тригонометрических функций Trigonometric Function, который выполняет вычисление тригонометрической функции ![]() , где
, где ![]() — волновое число, а изменение растояния d реализовано с помощью блока источника линейно изменяющегося воздействия Ramp [3]. Схема ФАПЧ в среде Simulink моделируется с помощью стандартного блока PLL [4].
— волновое число, а изменение растояния d реализовано с помощью блока источника линейно изменяющегося воздействия Ramp [3]. Схема ФАПЧ в среде Simulink моделируется с помощью стандартного блока PLL [4].
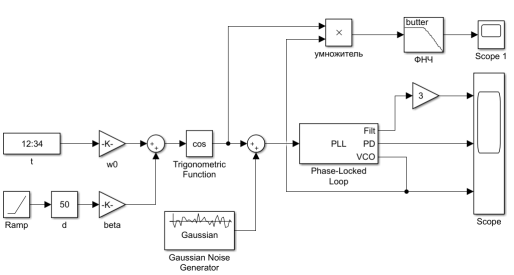
Рис. 4. Схема для моделирования работы ФАПЧ
В качестве шума используется стандартный Гауссовский шум (нормальное распределение с математическим ожиданием μ = 0 и стандартным отклонением σ = 1). Скорость перемещения удалённого блока 50 м/с, низкочастотный фильтр Баттерворта 8-го порядка.
|
а) fср=10 Гц |
б) fср=30 Гц |
|
в) fср=50 Гц |
г) fср=100 Гц |
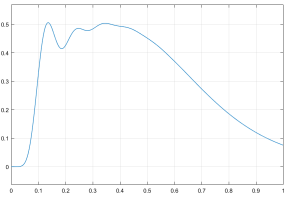
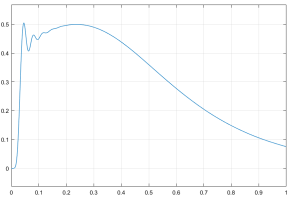
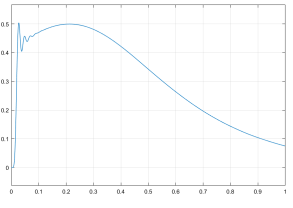
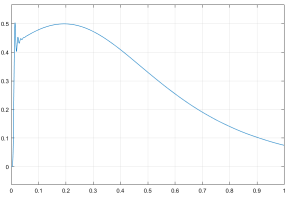
Рис. 5. Ошибки по фазе при различных частотах среза ФНЧ
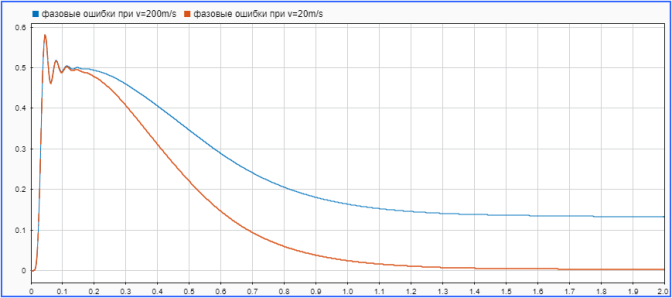
Рис. 6. Ошибки по фазе при различных скоростях изменения расстояния
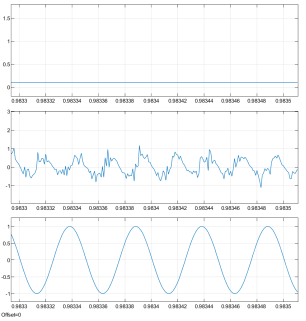
Рис. 7. Сигналы на выходе ФАПЧ (ФНЧ, ФД, ГУН соответственно)
Из графиков видно, что при различных значениях частоты среза ФНЧ схема работает устойчиво; чем выше скорость изменения расстояния, тем больше фазовые ошибки, но фазовый сдвиг компенсируется. Выходное напряжение фазового детектора пропорционально фазе принимаемого сигнала и искажается при присутствии шума. Сигнал на выходе ГУН не зависит от уровня шума.
Основные выводы
Фазовая стабильность системы синхронизации зависит не только от выбранной частоты среза ФНЧ, но и от скорости перемещения удаленного блока. Качество сигнала в большей степени определяется качеством опорного сигнала в центральном блоке. Однако, характеристики сигнала будут зависеть от характеристик среды передачи и от качества составляющих подсистем, используемых для построения схемы синхронизации. Таким образом, эффективность системы должна быть промоделирована в зависимости от свойств канала и подсистемы синхронизации.
Однако некоторые характеристики этой схемы в дополнение к требованию о совершенной направленности подсистем делают невозможным её практическое осуществление. Одним из этих условий является то, что фазовые детекторы центрального блока и удаленного устройства должны работать на несущей частотой fc. Эта частота для общей системы микроволновой связи имеет порядок несколько ГГц, в то время как типичные фазовые детекторы хорошо работают только на частотах порядка нескольких МГц. С другой стороны, фазовые детекторы предназначены для работы в линейном режиме, обеспечивающем нулевую или малую фазовую ошибку. Однако в этой схеме фазовый детектор в центральном блоке должен работать с различными фазовыми погрешностями (до 2 φ), что не позволяет работать в линейном режиме.
Достоинством данной схемой является простая реализация, основана на передаче одной несущей частоты между двумя удаленными друг от друга станциями: один центральный блок и один выносной блок.
Литература:
- Juan Carlos Merlano Duncan, «Phase Synchronization Scheme for Very Long Baseline Coherent Arrays», 2012. 197 с.
- Голуб В. Система ФАПЧ и ее применения. Chip News. 2000. № 4. 15с.
- Черных И. В. Simulink: Инструмент моделирования динамических систем. М.: Диалог-МИФИ. 2003. 252 с.
- https://www.mathworks.com/help/comm/ref/basebandpll.html.
