





В статье рассматривается методика изучения «алгоритмизации» с использованием Лего Mindstorms EV3 в рамках проведения уроков информатики в 8-м классе. Применение задачи по спортивной робототехнике в рамках изучения линейных алгоритмов на уроках информатики в 8-х классах при изучении «Информатики».
Ключевые слова: линейный алгоритм, среда программирования, блоки, блок математика, рабочее поле, градусы, расстояние.
Особенности методики обучения алгоритмизации на базе Лего Mindstorms EV3 заключается в изменении стандартных методов изучения темы «алгоритмизации» на использование образовательной робототехники с сохранением тематических разделов в рамках программы по информатике в 8-м классе.
В рамках изучения раздела «Алгоритмы и исполнители» по рабочей программе Босовой Л. Л. происходит практическое изучение линейных алгоритмов с использование исполнителей. В рамках использования новой методики целесообразно рассмотреть соревновательную задачу «РобоФишки». Данную задачу легко решить используя линейный алгоритм.
В начале занятия необходимо поставить перед учащимися задачу, продемонстрировать имеющиеся ресурсы (см. рис. 1).
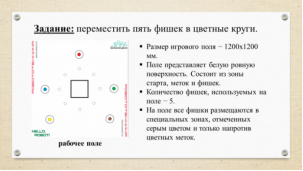
Рис. 1. Слайд 2
Для решения поставленной задачи используется блок «Математика», необходимо объяснить учащимся принцип работы блока.
Блок Математика служит для выполнения математических вычислений. Он позволяет выполнить выбранную математическую операцию над двумя числами, заданными параметрами «a« и «b« (см. рис. 2).
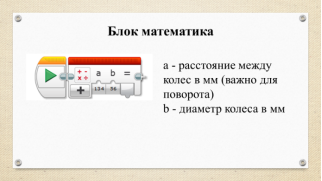
Рис. 2. Слайд 3
Также для решения задачи необходимо создать блок с важными для задачи характеристиками. Для этого можно добавить блок «операции с данными» в рабочую область (см. рис. 3).
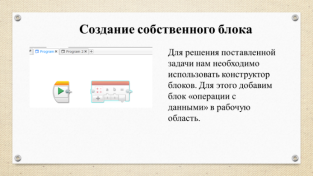
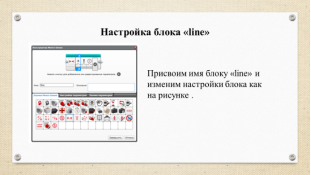
Рис. 3. Слайд 4 Рис. 4. Слайд 5
Блоку «line» можно присвоить имя и изменить настройки блока, как на рисунке (см. рис. 4).
Добавим новую программу и назовем ее «Program 2». Добавим блок «Датчик» в рабочее поле (Рис. 5).


Рис. 5. Слайд 6 Рис. 6. Слайд 7
Нажмем на блок, который мы добавили, затем нажмем на пункт меню инструменты и выберем пункт «Конструктор Мой блок». Появится всплывающее окно создания своего блока. Для создания блока разворота изменим Мой блок (Рис. 6).
Необходимо установить значение a=90 (угол в градусах), а также установить две скорости вращения первого и второго мотора равное 30 и минус 30. Сменим программу на «povorot». Добавим два красных блока «математика», первый со знаком деления, второй со знаком умножения. Для деления значения переменной установим значение a = 134мм. (расстояние между колес), а значение b = 56мм. (диаметр колес). Значения a и b важны для решения поставленной задачи. Добавим блок действия (зеленый) — независимое управление моторами. Выберем количество градусов равное 90, остальные значения ставим равное 0 (Рис. 7).
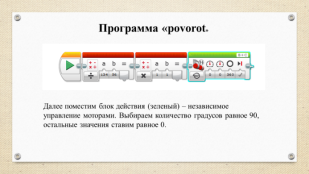
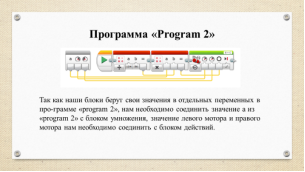
Рис. 7. Слайд 10 Рис. 8. Слайд 12
Далее соединим результат деления с переменной b в блоке умножения, а результат умножения с градусом в блоке действия. Так как наши блоки берут свои значения в отдельных переменных в программе «program 2», нам необходимо соединить значение a из «program 2» с блоком умножения, значение левого мотора и правого мотора нам необходимо соединить с блоком действий (Рис. 8).
Перейдем в программу под названием «line», добавим три блока «математика». Первые два будут блоки умножения, третий блок деления. В первом блоке умножения установить b=360(вращение вокруг своей оси в градусах), во втором блоке умножения установить значение a=3.14 (π), а b=56 (диаметр колес). Соединим результат первого блока умножения с переменной a в блоке деления, а результат во втором блоке умножения с переменной b в блоке деления (Рис. 9)
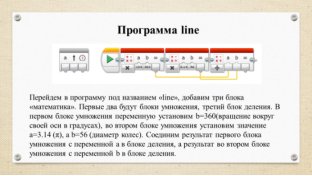
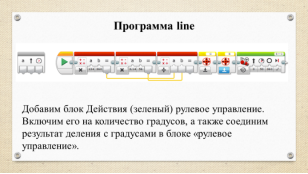
Рис. 9. Слайд 13 Рис. 10. Слайд 15
Добавим два сброса для блока «датчик» вращение мотора. Укажем у первого порт C, а у второго порт B (порты подключения мотора). Добавим блок Действия (зеленый) рулевое управление. Включим его на количество градусов, а также соединим результат деления с градусами в блоке «рулевое управление» (Рис. 10).
Самостоятельно соединим значения из программы «program» со значениями в программе «line» и опишем алгоритм перемещения фишек в цветные зоны во вкладке «program». Учащиеся выполняют работу в парах. Затем каждый оценивает результат работы, соотнося его с эталоном (Рис. 15, 16).
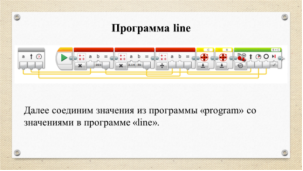
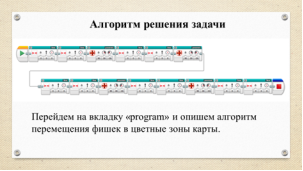
Рис. 11. Слайд 16Рис. 12 Слайд 17
В данной задаче решение основано на точных вычислениях расстояния он орбота до того места где должна находиться фишка, а также очень важен угол, на который поворачивается наш исполнитель.
Учитель выдает ученикам линейку и транспортир и предлагает произвести точные замеры расстояний и уголов, а также говорит в какой последовательности каждая группа должна переместить фишки в цветные зоны.
Выводы:
Применение методики выводит изучение базового раздела, как «Алгоритмы и исполнители» на совершенно новый уровень, способствуя повешения уровня знаний ввиду своей наглядности, работе в игровой форме при решении поставленных задач.
Литература:
- Волкова С. И. Конструирование. — М.: «Просвещение», 2009.
- Вязовов С. М. Соревновательная робототехника: приемы программирования в среде EV3: учебное пособие / С. М. Вязовов, О. Ю. Калягина, К. А. Слезин. — М.: Перо, 2013. — 132 с.
- Копосов Д. Г. Первый шаг в робототехнику / Д. Г. Копосов. — М.: БИНОМ; Лаборатория знаний, 2012. — 189 с.
