





В настоящей работе исследуются различные архитектуры глубоких нейронных сетей для прогнозирования временного ряда горизонтальной дальности видимости в аэропорту Манас.
Ключевые слова:GRU, LSTM, глубокое обучение, прогноз временных рядов, дальность видимости.
Прогноз погодных факторов, являясь, наверное, одной из наиболее старейших задач прогноза до сих пор привлекает внимание многих ученых ввиду большого влияния климата на различные стороны человеческой жизни. В настоящее время в свободном доступе находятся большие объемы данных, полученные с помощью глобальной сети метеостанций, что позволяет исследовать скрытые в них закономерности с применением методов глубокого обучения для получения более точных прогнозов погодных факторов. Особенно большое значение имеет прогноз погоды в зоне полетной навигации, где одним из важнейших факторов на всех этапах полета является видимость. По данным ИКАО (международной организации гражданской авиации) более 90 % аварий и катастроф происходит в условиях ограниченной видимости, из них 80 % — на посадке. Полеты в горной местности относятся к полетам в особых условиях. Горы оказывают значительное влияние на аэродинамические характеристики воздушных судов, работу средств навигации и метеорологические условия. Основным явлением, затрудняющим или исключающим выполнение полетов горной местности, является туман [1].
Среднее в году число дней с туманами в центральной по высоте зоне Бишкека равно 29, а максимально возможное 45. Эти показатели можно распространить и на всю северную зону города, так как метеостанция Чуйская, расположенная примерно на 150 м ниже имеет такие же данные наблюдений. Следовательно, туманы в зоне аэропорта Манас являются достаточно обыденным явлением в холодную половину года, поздней осенью, зимой и ранней весной они представляют вполне ощутимые сложности для авиации, связанные с возможной отменой и переносом рейсов, а также для работы наземного транспорта [2], что приводит к большим финансовым и временным потерям. В настоящее время вопрос прогноза дальности видимости исследуется многими учеными, например, в работе [3], показана возможность прогнозирования видимости в аэропорту Урумчи с помощью многослойной нейронной сети.
Таким образом, прогноз видимости в аэропорту Манас в связи с его географическим расположением, особенностями климата и большим влиянием на движение воздушных судов и наземного транспорта является актуальной задачей и в настоящей работе исследуются различные архитектуры глубоких нейронных сетей для прогнозирования временного ряда горизонтальной дальности видимости.
Исходные данные для исследования были получены с сайта rp5.ru [4]. Данные наблюдений в формате SYNOP (Surface SYNOPtic Observations — формат для оперативной передачи данных приземных гидрометеорологических наблюдений с сети станций гидрометслужбы, расположенных на суше) поступают на сайт восемь раз в сутки, через каждые три часа. В настоящее время сайт предоставляет прогнозы погоды для 172500 населённых пунктов и данные наблюдений, выполненных на 10400 метеостанциях. Из всего набора доступных данных для проведения эксперимента были выбраны временные ряды горизонтальной видимости, температуры, давления, направления ветра, скорости ветра и влажности за 14 лет с апреля 2005 г. по апрель 2019 года. В целом рассматривались данные 5 станций, расположенных примерно на одинаковой высоте над уровнем моря (максимальная разность высот составила немногим более 200 м) в радиусе 150 км от аэропорта Манас (табл. 1.). Обучающая выборка составила 30000 отсчетов, тестовая — 10000, оставшиеся данные (рис. 1), использовались для построения контрольных прогнозов. Отсутствующие по тем или иным причинам значения были заполнены, предыдущими существующими значениями. Затем данные, содержащие качественные оценки и представленные в текстовом виде, такие как направление ветра (например, «Ветер, дующий с востока») были векторизованы путем их кодирования целыми числами в порядке их появления в исходных данных [5].
Таблица 1
Станции-источники данных
|
Станция |
Страна |
Широта, град. |
Долгота, град. |
Высотан.у.м, м. |
Удаление, км |
|
Манас |
Кыргызстан |
43.067 |
74.483 |
637.0 |
0 |
|
Бишкек |
Кыргызстан |
42.850 |
74.533 |
760.0 |
24 |
|
Токмак |
Кыргызстан |
42.833 |
75.283 |
817.0 |
70 |
|
Отар |
Казахстан |
43.533 |
75.250 |
743.0 |
81 |
|
Хантау |
Казахстан |
44.217 |
73.800 |
504.0 |
139 |
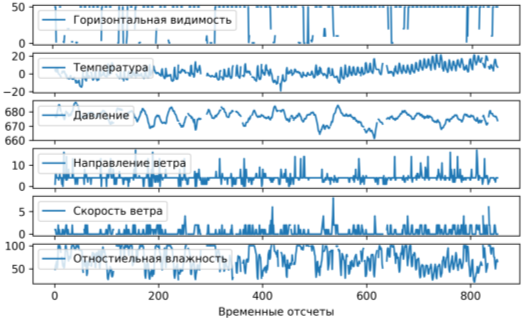
Рис. 1. Данные о погоде в аэропорту Манас в период с 15 декабря 2018 по 1 апреля 2019 г. (формат SYNOP)
Так как дальность видимости в формате SYNOP может принимать 21 дискретное значение, эти значения также были закодированы целыми числами, а ошибка сети вычислялась по формуле категориальной перекрестной энтропии (cross entropy, CE) [6]:
 ,(1)
,(1)
где B — количество выборок исходных данных на каждом шаге обучения — параметр от которого зависит скорость и точность обучения, его значение принято равным 128 так как при этом значении получается меньшая ошибка прогноза на тестовой выборке, С — количество возможных дискретных значений, ![]() –функция возвращающая 1, если i-e наблюдение равно дискретному значению Сс, а иначе 0,
–функция возвращающая 1, если i-e наблюдение равно дискретному значению Сс, а иначе 0, ![]() — вероятность, предсказанная моделью того, что i-e наблюдение принимает дискретное значение Сс.
— вероятность, предсказанная моделью того, что i-e наблюдение принимает дискретное значение Сс.
После перебора множества возможных вариантов количество нейронов N принято равным 32. Для регуляризации выходов, сформированных рекуррентными слоями, такими как GRU и LSTM, к внутренним рекуррентным слоям блоков применяется постоянная во времени маска прореживания с коэффициентом 0.2. Для сравнения предлагается использовать также базовый метод прогноза, заключающийся в том, что через 3 часа дальность видимости будет такой же, как и сейчас, а через 12 и 24 часа будет равна 50 км — самому часто встречающемуся возможному значению.
Рассматривалась возможность прогноза на 1 шаг вперед, с дальностью 3, 12, 24 часа. При этом использовались данные 1, 3 и 5, станций из табл. 5 в порядке их удаления от аэропорта Манас. В табл. 2 показан процент верно выполненных прогнозов сетями с различными архитектурами, обученными по алгоритму RMSProp на протяжении 50 эпох по 500 шагов, в каждом из которых ошибка вычислялась по формуле (1).
Таблица 2
Результаты вычислительного эксперимента cиспользованием данных SYNOP
|
Упреждение прогноза |
3 часа |
12 часов |
24 часа |
||||||
|
Модель |
Количество станций |
||||||||
|
1 |
3 |
5 |
1 |
3 |
5 |
1 |
3 |
5 |
|
|
LSTM |
93.36 |
92.73 |
89.48 |
89.87 |
89.78 |
89.59 |
89.57 |
89.57 |
89.57 |
|
GRU |
93.41 |
92.91 |
89.48 |
89.97 |
89.64 |
89.59 |
89.57 |
89.57 |
89.57 |
|
Dense+GRU |
93.39 |
92.37 |
89.48 |
89.59 |
89.59 |
89.59 |
89.57 |
89.57 |
89.57 |
|
Conv1D+GRU |
92.19 |
91.60 |
89.48 |
89.59 |
89.59 |
89.59 |
89.57 |
89.57 |
89.57 |
|
MWP+GRU |
93.21 |
92.62 |
89.48 |
89.59 |
89.59 |
89.59 |
89.57 |
89.57 |
89.57 |
|
Базовый метод |
93.59 |
89.59 |
89.57 |
||||||
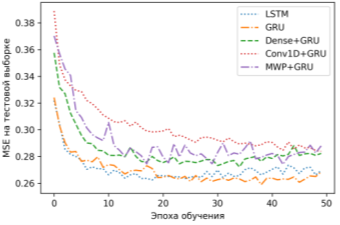
Из табл. 6 видно, что для прогноза с упреждением 3 часа процент верно выполненных с помощью глубоких сетей прогнозов немного ниже, чем у прогноза, полученного с помощью базового метода, а для упреждения 24 часа равен ему. Другими словами, обученные нейронные сети практически точно воспроизводят предложенный базовый метод прогноза. Значение верности 89.48 %, полученное при обучении сетей по данным 5 метеостанций соответствует предположению, что дальность видимости будет всегда принимать значение 50 км. Как показывают результаты вычислительного эксперимента, использование данных нескольких метеостанций не является целесообразным, так как при этом точность прогноза только ухудшается. На рис. 2 показано изменение CE, найденного по формуле (1), в процессе обучения сетей.
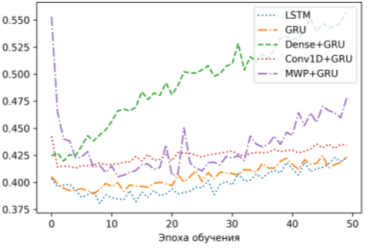
Как можно видеть из графиков, уже при упреждении прогноза в 12 часов начинает проявляться эффект переобучения, так как с увеличением
a)
б)
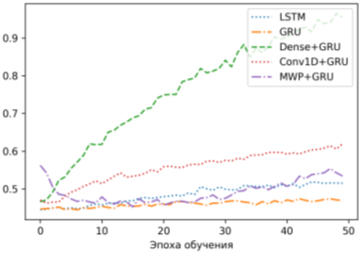
в)
Рис. 2. Зависимость CE глубоких нейронных сетей от эпохи обучения на тестовой выборке для прогноза по данным одной станции с дальностью: а)3 часа, б) 12 часа, в) 24 часа.
упреждения прогноза увеличивается количество предыдущих отсчетов необходимых для его получения, а, следовательно, уменьшается количество образцов в обучающей выборке. Это говорит о том, что использование сетей с одинаковой архитектурой при разной дальности прогноза, не является оптимальным вариантом. При увеличении дальности прогноза емкость сетей, т. е. количество нейронов в скрытых слоях, необходимо уменьшать или же увеличивать объем обучающей выборки для того, чтобы избежать переобучения.
На рис. 3 показаны результаты прогнозов с упреждением 12 часов, полученных с применением нейронных сетей GRU и LSTM, обученных до достижения минимального значения СE. Как можно видеть из рис. 3, при упреждении прогноза 12 часов нейронные сети хотя и не комбинируют два варианта, предложенных в базовом методе, но в целом не дают прогноз, значительно превосходящий по точности базовый метод. Это, можно объяснить тем, временной интервал между возникновением совокупности погодных условий, являющихся причиной ухудшения или улучшения дальности видимости, и возникновением этого явления составляет менее 3 часов.
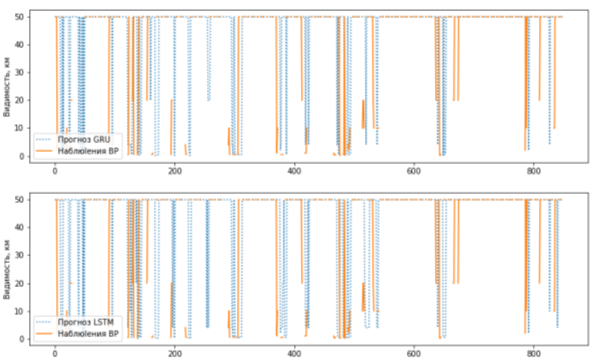
Рис. 3. Прогноз дальности видимости в аэропорту Манас с упреждением 12 часов с помощью GRU и LSTM нейронных сетей в период с декабря 2018 по апрель 2019 г.
Следовательно, для прогноза дальности видимости необходимо использовать данные о погоде с меньшим шагом по времени, чем были использованы в данном случае [5].
Прогноз дальности видимости ваэропорту Манас сиспользованием данных METAR
Cайт rp5.ru [4] для аэропорта Манас и других аэропортов предоставляет данные в формате MEТAR, (METeorological Aerodrome Report) — авиационный метеорологический формат для передачи сводок о фактической погоде на аэродроме. Они содержат сведения о скорости и направлении ветра, дальности видимости на взлетно-посадочной полосе, атмосферных явлениях, облачности, температуре воздуха, точке росы и атмосферном давлении. Из всего набора доступных с 2014 года данных, для проведения эксперимента были выбраны временные ряды этих параметров за 6 лет и 9 месяцев — с марта 2014 г. по ноябрь 2019 года Данные за этот период даны с интервалом дискретизации 30 мин, тогда как в период с августа 2013 года по февраль 2014 данные собирались с интервалом в 1 час. Обучающая выборка составила 68175 отсчетов, тестовая — 22725, оставшиеся данные — 900 отсчетов. Данные, содержащие качественные оценки, были векторизованы, как и ранее, путем их кодирования целыми числами в порядке их появления в исходных данных (рис. 4) и затем нормированы с помощью z-оценок.
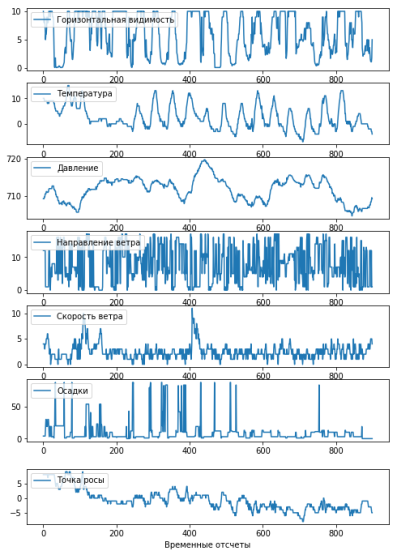
Рис. 4. Данные о погоде в аэропорту Манас в период со 2 по 21 ноября 2019 г. (формат METAR)
Дальность видимости в формате METAR может принимать 57 дискретных значений, эти значения были закодированы целыми числами в порядке увеличения дальности видимости, а ошибка сети вычислялась с помощью «шарнирной» функции ошибки:
![]() ,(2)
,(2)
где ŷ— выход нейронной сети, а y— закодированное в виде вектора значение класса:
 ,
,
где Сс — наблюдаемое значение дальности видимости.
Архитектуры используемых GRU, Conv1D+GRU и MWP+GRU нейронный сетей приведены в работе [5]. В табл. 3 показано минимальное значение функции ошибки, достигнутое сетями с различными архитектурами, обученными по алгоритму RMSProp на протяжении 50 эпох по 500 шагов, в каждом из которых ошибка вычислялась по формуле (2).
Таблица 3
Результаты вычислительного эксперимента cиспользованием данных METAR
|
Модель |
Упреждение прогноза, ч |
|||||
|
0.5 |
1 |
1.5 |
2 |
2.5 |
3 |
|
|
MWP |
0.4578 |
0.4823 |
0.6027 |
0.6245 |
0.6465 |
1.9943 |
|
MWP+GRU |
0.4346 |
0.4561 |
0.4778 |
0.4936 |
0.5090 |
0.5110 |
|
Conv1D+GRU |
0.4402 |
0.4571 |
0.4714 |
0.4854 |
0.4984 |
0.5036 |
|
GRU |
0.4383 |
0.4547 |
0.4711 |
0.4831 |
0.4972 |
0.5092 |
Как видно из табл. 3, ошибка достаточно быстро увеличивается с увеличением упреждения прогноза. На рис. 5 показаны результаты прогнозов с упреждением 30 мин, полученных с применением различных нейронных сетей, обученных до достижения минимального значения H.
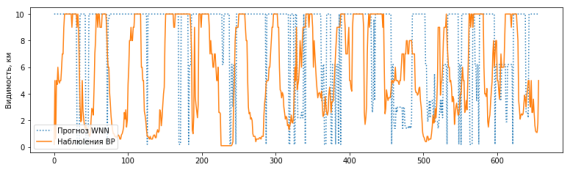
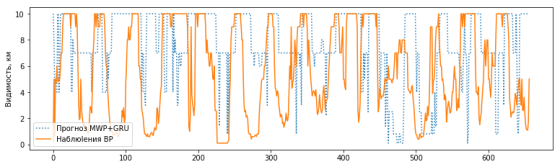
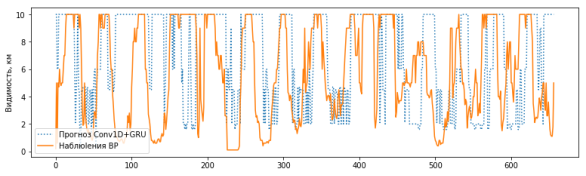
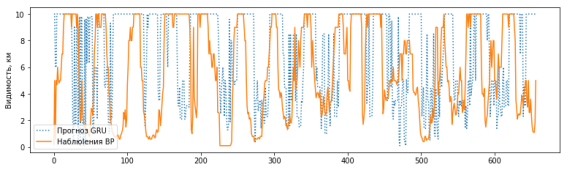
Рис. 5. Прогноз дальности видимости в аэропорту Манас с упреждением 30 минут с помощью различных глубоких нейронных сетей в период со 1 по 21 ноября 2019 г.
В случае применения MWP-сети — MAE найденное по формуле (5) равно 1.114 км; MWP+GRU-сети — MAE= 0.8770 км; Conv1D+GRU-сети — MAE 0.7345 км; GRU-сети — MAE= 0.7311 км. Для сравнения MAE базового прогноза, основанного на предположении о том, что дальность видимости через 30 мин. будет такой же как сейчас, составляет 1.569 км. Следовательно, использование GRU глубокой нейронной сети позволяет уменьшить ошибку прогноза более чем в 2 раза, по сравнению с базовым методом прогноза и 1.5 раза по сравнению с поверхностной нейронной сетью.
Заключение
Таким образом, в работе показано, что прогноз дальности видимости в аэропорту является актуальной задачей и предложен базовый метод прогноза такого временного ряда. Выполнено сравнение результатов прогноза, полученных с помощью различных архитектур глубоких нейронных сетей по сравнению с базовым методом прогноза. Показано, что использование данных нескольких метеостанций не является целесообразным для прогноза дальности видимости. Также показано, что использование одинаковых методов прогноза и идентичных архитектур нейронных сетей для различных значений упреждения прогноза с использованием одинаковых данных не является оптимальной стратегией прогноза. Исходя из полученных результатов, можно сделать вывод о том, что для прогноза дальности видимости необходимы данные погоде с временным шагом менее 3 часов. Использование GRU глубокой нейронной сети позволяет уменьшить ошибку прогноза более чем в 2 раза, по сравнению с базовым методом прогноза и 1.5 раза по сравнению с поверхностной нейронной сетью.
Литература:
- Жильчук И. А. Диагноз и прогноз посадочных характеристик видимости с глиссады снижения в туманах горной местности: Автореф. дис. канд. геогр. наук. — Воронеж, 2006. — 24 с.
- Подрезов О. А. Современный климат Бишкека, Чуйской долины и северного склона Киргизского хребта. Бишкек: Изд-во КРСУ, 2013. 202 с.
- Zhu, L., Zhu, G.D.,Han, L. and Wang, N. (2017) The Application of Deep Learning in Airport Visibility Forecast. Atmospheric and Climate Sciences, 7, 314–322 11th International Conference on Agents and Artificial Intelligence. 2019. Vol. 2, pp. 466–473.
- https://rp5.ru/docs/search/en (дата обращения: 01.04.2020).
- Верзунов С. Н. Применение глубоких нейронных сетей для краткосрочного прогноза дальности видимости // Проблемы автоматики и управления. 2019. № 1 (36). C. 118–130.
- Антонио Джулли, Суджит Пал Библиотека Keras — инструмент глубокого обучения. — М.:ДМК Пресс, 2018. — 294 с.
