





В данной статье рассматривается интеллектуальная система управления полным приводом, приводятся структурные схемы аппаратной и программной части системы управления.
Ключевые слова: автомобиль, интеллектуальная система, система управления, полный привод.
Большую часть времени современные автомобили проводят в городских условиях и на дорогах с хорошим дорожным покрытием. При движении в таких условиях, постоянный полный привод не дает никаких преимуществ, а лишь увеличивает расход топлива. Гораздо более рационально в таких условиях иметь систему интеллектуального полного привода, которая будет перераспределять крутящий момент на заднюю ось, только при необходимости. Такая система позволяет снизить расход топлива до 20 %, не сильно снижая при этом проходимость автомобиля. Ведущие автомобильные концерны тратят большие средства на их разработку. Они существенно повышают безопасность, удобство и скорость вождения. [1]
Интеллектуальная система полного привода — это совокупность программных и технических средств для решения задачи по распределению крутящего момента по осям автомобиля. Одной из важнейших составляющих интеллектуальной системы полного привода автомобиля является система управления. Для разработки такой системы в первую очередь нужно составить структурную схему системы. Разрабатываемая система физически состоит из датчиков, микроконтроллера, исполнительного устройства и жидкокристаллического индикатора. Структурная схема аппаратной части представлена на рисунке 1. Датчики собирают информацию о параметрах движения автомобиля и передают ее микроконтроллеру. Для правильной работы системы управления интеллектуального полного привода необходимо наличие следующих датчиков:
– Датчик частоты вращения колес автомобиля;
– Датчик бокового ускорения;
– Датчик угла поворота руля;
– Датчик температуры муфты;
– Датчик включения стоп-сигналов.
Микроконтроллер служит для обработки данных, поступающих с датчиков, и посылает управляющие сигналы исполнительному устройству. Исполнительное устройство согласно сигналам, получаемым с микроконтроллера, передает крутящий момент на задний мост автомобиля. На жидкокристаллическом индикаторе выводится информация о режиме работы системы интеллектуального полного привода, которую подает микроконтроллер.
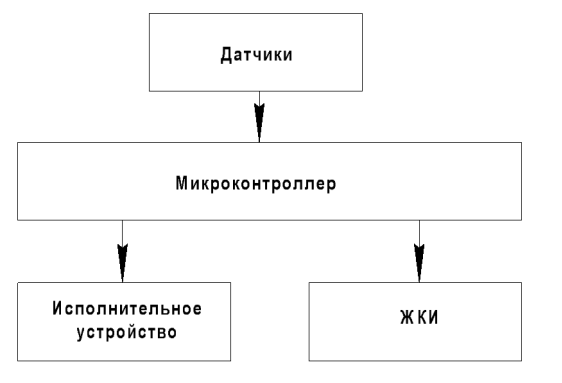
Рис. 1. Структурная схема аппаратной части
С программной точкой зрения, разрабатываемая система управления содержит модуль обработки сигналов, модуль фильтрации данных, алгоритм работы, модуль отправки сигналов, модуль вывода информации на жидкокристаллический дисплей. Модуль обработки сигналов получает данные с датчиков, затем эти сигналы фильтруются. Далее в соответствии с алгоритмом работы происходит передача сигналов на исполнительное устройство. В конце производится вывод информации о режиме работы системы интеллектуального полного привода на жидкокристаллический индикатор. Структурная схема программной части системы управления представлена на рисунке 2.
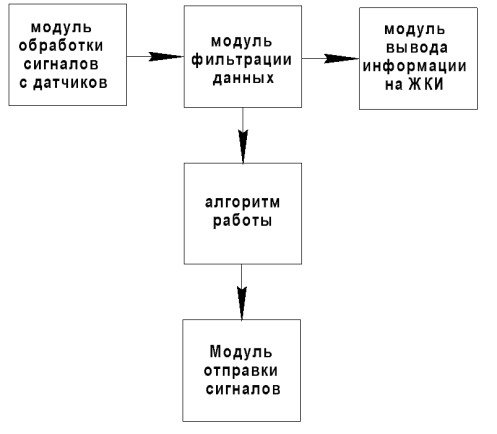
Рис. 2. Структурная схема программной части системы управления
Входными сигналами в систему управления являются электрические сигналы, приходящие с датчиков, а выходными — сигналы, поступающие с микроконтроллера на жидкокристаллический индикатор. Механизмом в большей части является микроконтроллер, который обрабатывает данные и формирует управляющие сигналы.
В настоящее время, на рынке существует большое количество компаний, производящих микроконтроллеры. Для разрабатываемой системы управления необходимо подобрать такой микроконтроллер, количество портов ввода которого соответствовал бы количеству подключаемых датчиков и вспомогательных микросхем. Так же важной, чтобы разрядность микроконтроллера соответствовала решаемой задачи [2]. Под данные требования подходит микроконтроллер фирмы Texas Instruments TMS320F28335. Также можно использовать уже готовый модуль TE-TMS320F28335 на основе данного микроконтроллера.
Большую роль также играет программное обеспечение, записанное в микроконтроллер. От программного обеспечения зависит работоспособность всей системы интеллектуального полного привода, и его разработка является одной из важнейших задач, которой следует посвятить особое внимание.
Литература:
- Омеличев А. В. Учебник по устройству автомобиля. Издание второе. Исправленное и дополненное— М.: МОНОЛИТ, 288 стр.-2017.
- Остроух А. В., Николаев А. Б., Сальный А. Г., Кухаренко В. Н. Общие принципы построения SCADA-систем // Автоматизация и управление в технических системах. — 2013. — № 2(4). — С. 8–12.
