





В данной статье приведено исследование свойств системы автоматического регулирования с нечетким регулятором, который включает в себя нечеткое псевдолинейное корректирующее устройство с фазовым опережением и ПИД-регулятор.
Одним из альтернативных методов построения систем управления и регулирования объектами, нечетко определенными с точки зрения классической теории является использование так называемых контроллеров нечеткой логики.
Поэтому разработка регуляторов нечеткого управления на базе существующих микроконтроллеров является весьма актуальной задачей, так как псевдолинейный нечеткий регулятор, построенный на основе нечетких множеств и нечеткого логического ввода-вывода, в условии неопределенности возмущающего воздействия, способен обеспечить более высокие показатели качества переходного процесса, чем традиционный ПИД-регулятор.
В качестве псевдолинейных корректирующих устройств (ПКУ) используем: КУ с амплитудным подавлением, с фазовым опережением и с раздельными каналами для амплитуды и фазы, так как один из основных недостатков ПИД-регулятора является наличие фазового запаздывания и высокая чувствительность к помехам в измерительном канале
Ключевые слова: микроконтроллер, регулятор, псевдолинейное корректирующее устройство, контроллер нечеткой логики, качество переходного процесса.
Research of the automatic control system properties with fuzzy regulator, which includes fuzzy pseudo-linear correction device with phase advance and PID regulator is provides in this article
One alternative method of building object control and regulation systems that are fuzzy defined in terms of classical theory is the use of so-called fuzzy logic controllers.
Therefore, the development of fuzzy control regulators on the basis of existing microcontrollers is a very urgent task, as a pseudo-linear fuzzy regulator based on fuzzy sets and fuzzy logical input/output, in the condition of uncertainty of the disturbing effect, is able to provide higher performance of the transient process than the traditional PID regulator.
As pseudo-linear correction devices (PCCs) we use: CD with amplitude suppression, with phase advance and with separate channels for amplitude and phase, as one of the main disadvantages of PID regulator is the presence of phase delay and high sensitivity to interference in the measurement channel
Keywords: microcontroller, controller, pseudo-linear correction device, fuzzy logic controller, transient quality
Одним из перспективных и эффективных подходов современной теории управления сложных технологических систем в условиях неопределенности, вызванной нечеткостью исходной информации, является подход, основанный на применение методов экспертных оценок и теории нечетких множеств [1,2]. Технологические процессы, характеризующиеся многокритериальностью, функционируют в основном, в нечеткой среде. Поэтому, для оптимального управления режимами работы таких систем, необходимо учесть вектора критериев и нечеткость исходной информации.
По сравнению с традиционными методами анализа и вероятностным подходом методы нечеткого управления позволяют быстро производить анализ задачи и получать результаты с высокой точностью. Основные преимущества применения нечеткой логики для решения задач автоматизации по сравнению с традиционными подходами теории автоматического управления состоят в следующем:
− значительное повышение быстродействия процессов управления при использовании нечетких контроллеров;
− возможность создания систем управления для объектов, алгоритмы функционирования которых трудно формализуемы методами традиционной математики;
− возможность синтеза адаптивных регуляторов на базе классических ПИД регуляторов;
− повышение точности алгоритмов фильтрации случайных возмущений при обработке информации от датчиков;
− снижение вероятностей ошибочных решений при функционировании управляющих алгоритмов, что позволяет увеличить срок службы технологического оборудования.
Традиционные системы автоматизированного управления технологическими процессами строятся на основе линейных моделей объектов, построенных по некоторым критериям оптимальности. Полученные таким образом регуляторы являются оптимальными и устойчивыми по отношению к заложенным в их основу моделям реальных технологических процессов — объектов управления и регулирования. Однако часто методы упрощения и линеаризации, применяемые к нелинейным, динамическим, нечетко определенным объектам не дают ожидаемых результатов устойчивого управления и желаемого качества управления реальным технологическим процессом. С увеличиением сложности структуры объекта и выполняемых им функций становится все сложнее использовать классические методы управления.
Одним из альтернативных методов построения систем управления и регулирования объектами, нечетко определенными с точки зрения классической теории (для которых не получена аналитическая модель), является использование так называемых контроллеров нечеткой логики.
Поэтому разработка регуляторов нечеткого управления на базе существующих микроконтроллеров является весьма актуальной задачей, так как псевдолинейный нечеткий регулятор, построенный на основе нечетких множеств и нечеткого логического ввода-вывода, в условии неопределенности возмущающего воздействия, способен обеспечить более высокие показатели качества переходного процесса, чем традиционный ПИД — регулятор.
Так, как в настоящее время большинство САР строится на базе свободно программируемых промышленных контроллеров, поэтому имеется возможность создать систему с применением нечеткого регулятора.
Рассмотрим синтез нечеткого ПИД регулятора на базе микроконтроллера SIMATIC S7-1200 при помощи пакета прикладных программ MatLab.
Структура нечеткого регулятора совпадает со структурой нечеткой модели с одним выходом и зависит от объекта управления и процесса управления, а также от требований к его качеству. Поскольку сфера применения нечеткого управления очень широка, возможны различные структуры регулятора, отличающиеся числом входов, нечеткими множествами, функциями принадлежности, формой управляющих правил, типами механизмов вывода и методами деффазификации.
На вход регулятора поступает необходимое для решения конкретной задачи число входных сигналов. В нечетком регуляторе происходит процедура фазификации, т. е. исходя из текущего значения четкого сигнала, на основании известных функций принадлежности каждому сигналу четкого вектора присваивается определенное входное значение. Программа нечеткого логического вывода (FIS-структура) на основании нечеткой базы знаний ставит в соответствие каждому входному вектору значений выходной нечеткий вектор, являющийся результатом нечеткого логического вывода. Значениям лингвистических переменных, составляющих выходной вектор, на основании функций принадлежности ставятся в соответствие определенные четкие значения, образующие выходной четкий вектор, т. е. происходит процедура дефазификации
В нечетком регуляторе на основе сформулированных правил типа ЕСЛИ-ТО осуществляется формирование логического решения — получение нечеткого множества в форме результирующей функции принадлежности. Перевод текущих значений входных переменных нечеткого регулятора в лингвистические величины называют процедурой фаззификации.
Структурная схема с нечетким псевдолинейным регулятором приведена на рис. 2.
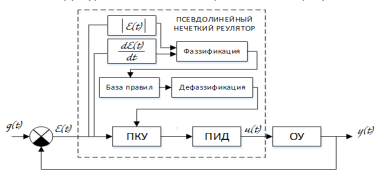
Рис.2
Псевдолинейный нечеткий регулятор включает в свой состав нечеткое псевдокорректирующее устройство (рис.3) последовательно соединенное с классическим ПИД-регулятором. Подстройка параметров ПКУ осуществляется по модулю ошибки и скорости изменения ошибки
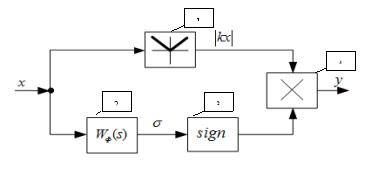
Рис. 3. Схема псевдолинейного корректирующего устройства с фазовым опережением: 1 — блок определения модуля, 2 — интегро-дифференцирующее звено, 3- знаковый оператор Sign, 4 — устройство перемножения
Используем ПКУ с фазовым опережением, так как основным недостатком ПИД-регулятора является наличие фазового запаздывания и высокая чувствительность к помехам в измерительном канале, поэтому он не всегда может дать хорошее качество регулирования [3].
Проверка работоспособности нечеткого регулятора проводилась в пакете Simulink среды MatLab на примере САР с объектом второго порядка. Схема моделирования работы САР с псведолинейным нечетким регулятором предствалена на рисунке 4. В данной схеме для автоматической подстройки постоянной времени ![]() псевдолинейного корректирующего устройства, используется S-Function, которая работает по написанному специальным образом M-файлу.
псевдолинейного корректирующего устройства, используется S-Function, которая работает по написанному специальным образом M-файлу.
Моделируем САР в ППП MatLab Simulink (Рис 4)
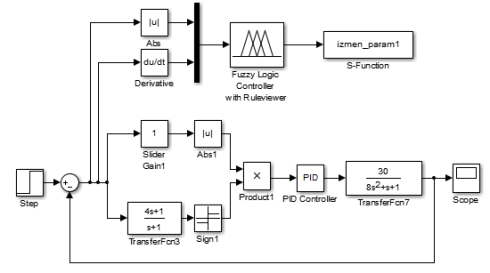
Рис. 4
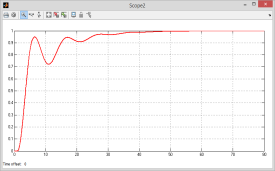
Получаем кривые переходного процесса в САР с классическим ПИД-регулятором (Рис. 5а) и нечетким псевдолинейным регулятором дополненным КУ с фазовым опережением (Рис. 5б).
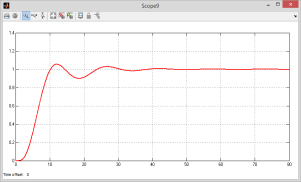
а)б)
Рис 5. Кривые переходного процесса
Таким образом, из графиков следует, что наилучший результат регулирования достигается при использовании нечеткого псевдолинейного регулятора. Входящее в его состав псевдолинейное корректирующее устройство позволяет обеспечить хорошее качество регулирования при изменении параметров объекта управления, что достигается путем определения его параметров на основе аппарата нечеткой логики.
Литература:
- Джарратино Д. Экспертные системы: принципы разработки и программирование. — 4-е изд. –М: ООО «И. Д. Вильямс». –2007. –1152 с.
- Gronostajski Z. The expert system supporting the assessment of the durability of forging tools // International journal of advanced manufacturing technology. –2016. –V. 82. — № 9. –P. 1973 –1991.
- Скороспешкин М. В., Псевдолинейный регулятор // Автоматика и программная инженерия. — 2013. — № 3(5). — с.27–29
