





С увеличением сложности современных технологических процессов, так же повышается уровень риска для людей, принимающих непосредственной участие в данных процессах. Одни из вариантов решения данной проблемы – использование дистанционного управления. Проблема дистанционного управления сложными технологическими процессами заключается в том, чтобы обезопасить человека и оградить его от непосредственного влияния данных процессов на его жизнь и здоровье, с другой стороны сохранить за человеком возможность управления данными технологическими процессами.
В данной статье рассматривается использование беспилотного аппарата с дистанционным управлением как возможность замены человека в различных областях. Беспилотный объект можно использовать там, где есть непосредственная угроза жизни и здоровью человека. Так же его можно использовать в труднодоступных местах, например горной или скалистой местности, на воде так над водной поверхностью. При плохой видимости и экстремальных температурах. Применение беспилотных объектом постепенно увеличивается, что влечет необходимость повышения их надежности и качества. Одним из требований качества и надежности беспилотных аппаратов – является качественный алгоритм по дистанционному управлению данным аппаратом.
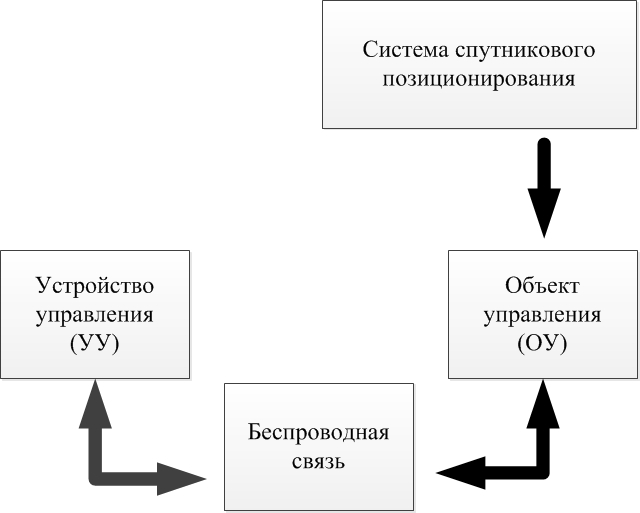
Рис. 1. Структурная схема комплекса
Наилучшим решением в данной ситуации будет создание комплекса по дистанционному управлению беспилотными объектами. Для этого необходимо провести анализ требований.
Во-первых, беспилотный объект будет перемещаться на открытой местности, следовательно, нужно найти подходящий способ определения его местоположения.
Во-вторых, необходимо найти способ передачи данных от беспилотного объекта, о его местоположении на устройство управления
Разработать общий алгоритм по дистанционному управлению беспилотным объектом.
В результате проведенного анализа был разработан экспериментальный комплекс по дистанционному управлению беспилотным объектом. Схема комплекса представлена на Ошибка: источник перёкрестной ссылки не найден. Комплекс состоит из следующих частей:
Система спутникового позиционирования – позволяет определить точное местоположение беспилотного объекта
Устройство управления – на котором отображается информация о текущем местоположении и состоянии беспилотного объекта, а так же система по управлению.
Объект управления – условное название беспилотного аппарата.
Беспроводная связь – система, посредством которой будет осуществляться передача данных между устройством управления и беспилотным аппаратом.
Чтобы иметь возможность дистанционного управления беспилотным объектом, необходимо разработать специальный формат сообщений и команд. Сообщения и команды должны удовлетворять следующим требованиям:
Типизация – однозначность пересылаемой информации.
Обозначения начала и конца – избежать некорректности данных.
Целостность.
Конечность – данные в сообщении или команде должны иметь строгий, конечный набор данных.
На основе описанных выше требований был разработан следующий формат сообщений и команд:
«AA[,данные]<Z>»
AA – двух символьная аббревиатура, указывает тип сообщения
[,данные] – список полей данных, разделенных специальным символом
<Z> – символ конца сообщения
Набор данных для каждого типа сообщений уникален. Тип сообщений позволяет непосредственно определить, какие данные находятся в данном сообщении или команде.
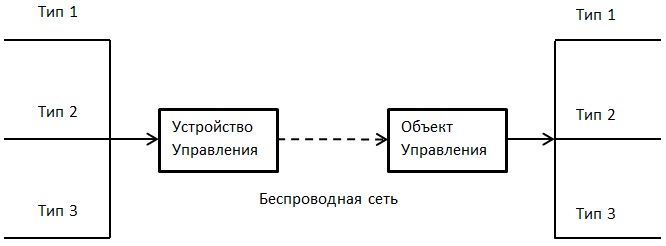
Рис. 2. Передача различных типов сообщений с устройства управления на объект управления
На Рис. 2 изображена схема передачи команд различных типов с устройства управления на объект управления посредству беспроводной сети.
Определение точного местоположения беспилотного объекта производится с помощью систем спутникового позиционирования. Для определения местоположения, необходимо использование сигналов как минимум от трех спутников [1, с. 17], но это не достаточно для максимальной точности. Учитывая тот факт, что беспилотный объект будет находиться, на открытой местности, это позволит ему получать сигнал, от 4 до 11-12 спутников одновременно, что даст достаточную точность определения местоположения беспилотного объекта. Так же нужно учитывать, что не все системы спутниковой навигации покрывают весь земной шар, этому требованию удовлетворяют только две системы: Американская – GPS, так же известная как NAVSTAR и Российская – ГЛОНАСС.
Передача данных осуществляется посредством систем беспроводной передачи данных. Наиболее известные технологии по беспроводной передачи данных: Bluetooth, IRDA, WI-FI, WiMax, передача данных посредством сотовой связи GSM и CDMA. Технологии обладают различной скоростью и радиусом действия от источника до потребителя.
В разрабатываемом комплексе используются две системы беспроводной передачи данных в зависимости от условий. Wi-Fi – обладает высокой скоростью передачи данных, но малым радиусом действия. Данную систему удобно использовать во время проведения небольших локальных работ, а так же при использовании нескольких беспилотных аппаратов. Беспроводная передача данных посредству сотовой связи имеет невысокую скорость передачи данных, но территориально практически не ограничена, основное ограничение – необходимость близости антенн сотовой связи.
Основная цель разрабатываемого комплекса – создание легко модифицируемой архитектуры. Такая архитектура позволит производить достаточно простую модификацию программного обеспечения для каждого из беспилотных аппаратов, вместо того, чтобы заново разрабатывать новый комплекс по дистанционному управлению беспилотным объектом.
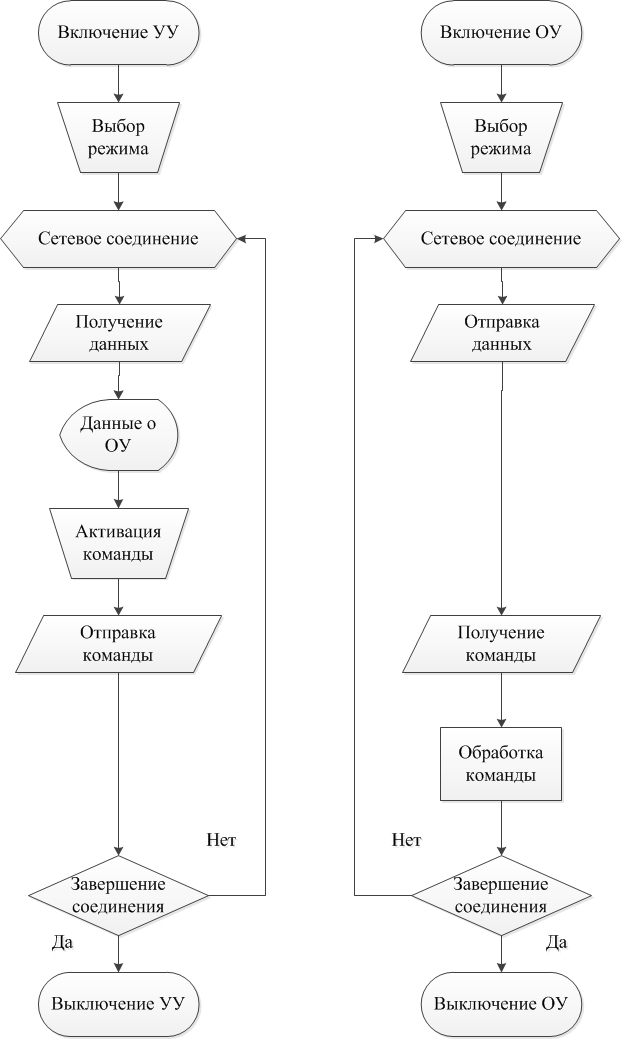
Рис. 3. Схема алгоритма работы комплекса
На Рис. 3 представлена общая схема работы комплекса по дистанционному управлению беспилотным объектом. Алгоритм заключается в следующих действиях:
Включение устройства и объекта;
Оператор выбирает режим, в котором будет работать комплекс;
Активация сетевого соединения между устройством и объектом;
Получение данных о состоянии и местоположении беспилотного объекта;
Анализ полученных данных оператором, и передача команды на беспилотный объект;
Беспилотный объект выполняет полученную команду.
Далее происходит повторение 3-6 пунктов, пока оператор устройства управления не подаст команду о завершении соединения и выключения устройств.
Так же предусмотрено возникновение поломок и разрывов связи между устройством управления и объектом управления. Поломка возможна как на устройстве управления, так и на объекте управления. В случае поломки на устройстве управления, на объект управления будет подана команда о переходе в режим блокировки, а на самом устройстве управления произойдет блокировка возможности управления объектом. Соответственно если поломка происходит на объекте управления, он попытается послать специальное сообщение о необходимости блокировки управления на устройство управления, а сам объект будет остановлен. В случае если между устройством управления и объектом управления связь будет утеряна и не восстановится, то через 3 секунды они оба переходят в режим блокировки, пока связь между ними не будет восстановлена.
Программное обеспечение для комплекса разрабатывается с использованием следующих технологий: среда разработки программного обеспечения Microsoft Visual Studio 2008 и Windows Mobile 6 Professional SDK; язык программирования – C#, входящий в состав .Net Framework 2.0 и .Net Compact Framework; среды развертки разрабатываемого программного обеспечения – Microsoft Windows с установленным .Net Framework 2.0 – или выше, и Microsoft Windows Mobile 5.0 или выше с установленным .Net Compact Framework 2.0 или выше.
Для проверки работоспособности разрабатываемого комплекса был проведен ряд экспериментов.
Первый эксперимент заключался в определении местоположения беспилотного объекта на местности. В качестве объекта (управления) выступал коммуникатор с разработанным программным обеспечением. Объект управления определял свое местоположение, а затем отправлял эти данные вместе с информацией о скорости и направлении движения на устройство управления. Максимальная погрешность отклонения точности позиционирования не превышала полутора метров.
Второй эксперимент заключался в передаче данных между устройством управления и объектом управления посредству некоторых технологий беспроводной передачи данных: Bluetooth, Wi-FI, GPRS/EDGE. Средняя скорость доставки данных между устройством управления и объектом управления с помощью этих технологий варьируется от 200-300 миллисекунд до 1-1.2 секунд.
Далее планируется разработка макета беспилотного объекта, а также совершенствование программного обеспечения. Например, добавление функций проверки целостности данных, а так же защита с использованием шифрования.
Литература:
http://www.u-blox.com Основы спутниковой навигации. Краткое руководство. 2007. – 132 с.
- Киселев А.А. Мониторинг сельскохозяйственной техники. / А.А. Киселев // Автоматизация в промышленности №1, 2011.
- Финогеев А.Г. Беспроводные технологии передачи данных для создания систем управления и персональной информационной поддержки. / А.Г. Финогеев - Пензенский государственный университет, 2008. – 51 с.