





Инерциальная навигация широко применяется практически во всех видах транспортных средств, но самое широкое применение она нашла в системах управления летательных аппаратов. Бесплатформенные инерциальные навигационные системы (БИНС) являются сегодня основными приборами, позволяющими решать навигационную задачу инерциальным способом с высокой степенью точности. В состав БИНС, как правило, входит цифровая вычислительная машина (ЦВМ), которая в литературе часто носит название «вычислитель» [1, 2]. Для нормальной работы вычислителя, как и любой другой современной вычислительной машины, необходимо наличие программного обеспечения. Процесс создания программного обеспечения цифровых вычислительных устройств включает в себя этапы отладки и тестирования. Отладка осуществляются, в первую очередь, посредством математических моделей реальных систем. Далее возникает необходимость тестирования в условиях максимально приближенных к номинальным, то есть на реальных системах и приборах. Тестирование новых алгоритмов работы БИНС или модификаций уже существующих оказывается весьма проблематичным. Связанно это с тем, что БИНС, как правило, создаются под конкретный алгоритм и внести изменения в их структуру невозможно. В данной статье кратко описано предложение по решению этой проблемы. Проект экспериментального стенда подразумевает создание комплекса на основе БИНС с датчиками угловой скорости и акселерометрами, позволяющего проводить испытания различных алгоритмов работы вычислителя с использованием, в качестве чувствительных элементов, реальных инерциальных приборов. Таким образом, проект позволит проводить тестирование алгоритмов работы вычислителя в сжатые сроки и с высокой степенью приближения к номинальным условиям эксплуатации. Кроме того, в комплекс заложена высокая структурная гибкость и большие возможности модификации, что дополнительно расширяет перспективы его использования.
Главными задачами экспериментального стенда являются:
проведение тестирования алгоритмов работы вычислителя БИНС на основе различных математических аппаратов;
исследования и проведение сравнительных испытаний алгоритмов работы вычислителя БИНС;
проведение наглядных сеансов работы БИНС в демонстрационных целях.
С учетом задач функционирования и возможностей их решения в условиях имеющейся материально-технической базы была разработана структура стенда, включающая в себя три главных элемента:
экспериментальная установка БИНС;
персональная вычислительная машина;
программное обеспечение.
При этом программное обеспечение включает в себя специальное программное обеспечение (СПО) персональной вычислительной машины – управляющую программу и программное обеспечение вычислителя (ПОВ) экспериментальной установки (ЭУ) БИНС. Что касается, собственно, ЭУ, то она представляет собой БИНС, вычислитель которой имеет особую конструкцию, позволяющую менять алгоритм работы. В общем случае принцип действия БИНС основан на измерении линейных ускорений по трем акселерометрам, расположенным на взаимно перпендикулярных плоскостях, а также измерении угловых скоростей по трем гироскопическим датчикам [2]. Таким образом, для инерциального определения координат местоположения объекта необходимо:
знать информацию о начальных значениях координат
 и скоростей
и скоростей
 ;
;непрерывно измерять проекции ускорения объекта с помощью акселерометров;
определять с помощью гироскопов ориентацию осей чувствительности акселерометров относительно навигационной системы координат;
дважды интегрировать ускорения объекта по времени.
В состав ЭУ помимо вычислителя входит блок акселерометров (БА), блок датчиков угловых скоростей (БДУС), блок преобразующих устройств (БПУ). Структурная схема стенда представлена на рисунке 1.

Рис.
1. Структурная схема стенда (![]() –
углы тангажа, рыскания, крена;
–
углы тангажа, рыскания, крена;
![]() –
угловые скорости;
–
угловые скорости;
![]() –
линейные скорости;
–
линейные скорости;
![]() –
координаты)
–
координаты)
БА имеет в составе усилитель-преобразователь (УП) и три чувствительных элемента, в качестве которых предполагается использовать маятниковые акселерометры (МА) Ц198. УП построен по трехканальной схеме, а каждый из трех МА измеряет линейные ускорения в одной из трех перпендикулярных плоскостей.
МА представляет собой подвижную механическую систему [4], на главной оси которой закреплен маятник, что отображает рисунок 2.

Рис. 2. Схема МА с электрической пружиной
При возникновении кажущегося ускорения, направленного по оси перпендикулярной главной оси МА, подвижный элемент – маятник будет стремиться сохранить свое положение неизменным и начнет разворачивать главную ось относительно опор на корпусе, датчика момента (ДМ), датчика угла (ДУ). Измерение угла отклонения главной оси осуществляется с помощью электрической пружины [3], то есть электрической связи ДУ с ДМ через УП, в качестве ключевого элемента которого используется ОУ, включенный по схеме инвертирующего усилителя.
БДУС по структуре аналогичен БА и включает в себя три ДУС и УП, который выполнен по трехканальной схеме с отрицательной обратной связью. ДУС каждого канала измеряет угловые скорости в перпендикулярных плоскостях. Для реализации проекта используются ДУС Л9 разработки НПО «Авиаприбор» (г. Москва) [4], в основе конструкции которого лежит двухстепенной гироскоп. Принцип действия основан на измерении гироскопического момента двухстепенного гироскопа, пропорционального измеряемой угловой скорости, с помощью, электрической пружины. Применена схема подобная схеме МА изображенная на рисунке 2.
С БДУС и БА снимается шесть сигналов: три сигнала в виде зависимостей напряжения от значения угловой скорости и три сигнала в виде зависимости напряжения от кажущегося ускорения в трех взаимно перпендикулярных плоскостях. При использовании предложенных датчиков значения напряжения имеют диапазон от -15 до +15В в БДУС и от –0,6 до +0,6В в БА. Вычислитель имеет в составе аналого-цифровой преобразователь (АЦП), который производит квантование и дискретизацию аналогового сигнала. Согласно спецификации выбранного АЦП, допустимый диапазон напряжений на его входе – от 0 до +5В. С целью согласования выходов БДУС и БА и входа АЦП в структуру и был введен БПУ.
После получения значений угловых скоростей и линейных ускорений происходит обработка сигнала в соответствии с установленным алгоритмом, вычисление параметров и передача их по каналу связи в ПЭВМ, где осуществляется обработка полученных параметров СПО, анализ, представление в удобном наглядном виде и сохранение. Алгоритм обработки сигналов вычислителем реализуется программно, что обеспечивает возможность его изменения путем изменения ПОВ.
Таким образом, можно выделить две основные задачи решаемые вычислителем:
обработка первичной информации (значение угловых скоростей и кажущихся линейных ускорений) в соответствии с установленным алгоритмом;
передача значений тангажа, рыскания, крена, линейных скоростей, перемещений через канал связи в ПЭВМ.
Вычислитель должен обладать достаточным быстродействием, т.к. алгоритмы бесплатформенной инерциальной навигации требуют значительных вычислительных ресурсов. В состав вычислителя должен входить АЦП для преобразования зависимостей напряжения от угловых скоростей и линейных ускорений, а также приемо-передающее устройство для обеспечения связи между ЭУ и ПЭВМ.
Эти требования определили использование в качестве вычислителя микроконтроллер (МК) PIC18F2550 производства Microchip. Этот МК относится к семейству высокопроизводительных микроконтроллеров с расширенной системой команд 16-разрядного формата (75 команд) [5]. В проекте используется один из четырех режимов работы генератора тактовых импульсов соответствующий частоте 20 МГц. МК содержит 10-ти разрядный АЦП, способный производить замеры с частотой 2 МГц. Для решения задачи связи с ПЭВМ возможно использовать входящие в состав МК универсальный приемо-передатчик UART, либо интерфейс USB.
Для проверки
возможности функционирования стенда было создано ПОВ, а также
управляющая программа для ПЭВМ. Общий алгоритм функционирования ПОВ
представлен на рисунке 3. После успешного завершения инициализации
происходит получение команды соответствующей выполнению одной из
функций предусмотренной алгоритмом. Главной функцией является
процедура решения навигационной задачи, которая включает в себя 5
процедур второго порядка. Процедура замера ускорений и угловых
скоростей производит последовательный замер напряжений на шести
каналах АЦП, к которым подключены акселерометры и ДУСы и передает
результаты в следующую процедуру. Далее происходит численное
интегрирование кинематических уравнений, определение вектора полного
ускорения, последовательное интегрирование вектора ускорений.
Выполнение этих действий обеспечивает решение навигационной задачи.
Конечная процедура осуществляет передачу параметров (углов тангажа,
рыскания, крена
![]() ,
угловых скоростей
,
угловых скоростей
![]() ,
линейных скоростей
,
линейных скоростей
![]() ,
а также координат
,
а также координат
![]() )
через канал связи в ПЭВМ.
)
через канал связи в ПЭВМ.
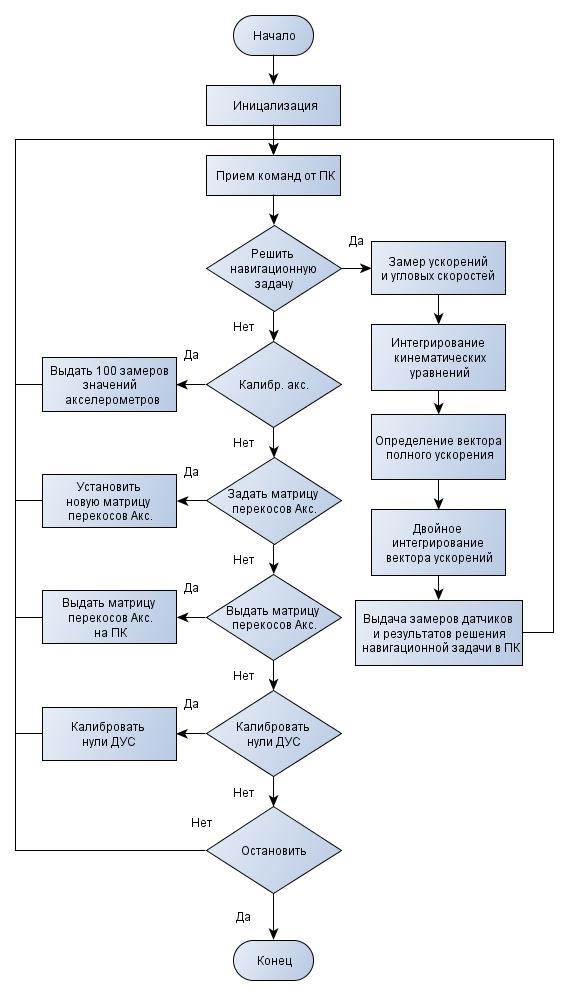
Рис. 3. Алгоритм функционирования ПОВ ЭУ
Вторая функция осуществляет калибровку акселерометров. Необходимость этой операции продиктована неизбежностью наличия погрешности установки акселерометров, т.е. отличием углов между осями чувствительность акселерометров от номинальных значений в 90 градусов. Результатом работы этой функции является формирование матрицы «перекосов» осей акселерометров, которая позволяет устранить погрешности установки акселерометров на корпус устройства, а также смещение нуля. Такая матрица храниться в памяти микроконтроллера и используется при решении навигационной задачи, а также может выдаваться по запросу с ПЭВМ. Кроме этого СПО имеет возможность задавать матрицу через канал связи. Эти операции реализуются посредствам третьей и четвертой функции. Калибровка нулей датчиков угловых скоростей осуществляется пятой функцией. ПОВ была создана с помощью среды разработки MPLAB v8.36 на языке программирования C.
Далее было создано СПО, которое позволяет решать задачи:
управления процессом настройки ЭУ;
управления функционированием ЭУ, решением навигационной задачи;
получения и обработки первичных параметров;
представления значений показаний с датчиков и вычисленных параметров в удобном для пользователя виде.
Одним из достоинств предложенной схемы является ее структурная гибкость. Блоки представляют собой функционально законченные структурные элементы, что позволяет перестраивать систему, заменяя блоки или внося в них изменения. Кроме того, возможность замены чувствительных элементов позволяет проводить сравнительные испытания. Таким образом, система имеет широкие перспективы модернизации, и сравнительную простоту ее осуществления.
Литература:
Матвеев, В.В. Основы построения бесплатформенных инерциальных навигационных систем: учебное пособие / В.В. Матвеев, В.Я. Распопов. / Под общ. ред. д.т.н. В.Я. Распопова. – СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. – 280 с.: ил.
Бранец, В.Н. Введение в теорию бесплатформенных инерциальных навигационных систем. / В.Н. Бранец, И.П. Шмыглевский – М.: Наука, 1992. – 280 с. – ил.
Лучко, С.В. Элементы и устройства систем управления и контроля: учебное пособие. / С.В Лучко, В.Я. Аникин – МО РФ, 1998. – 287 с.: ил.
Каргу, Л.И. Командно-измерительные приборы и системы: учебное пособие. / Л.И. Каргу – СПб.: ВИКУ имени А.Ф. Можайского, 1999. – 376 с.: ил.
Катцен С. PIC-микроконтроллеры. Полное руководство.: учебное пособие. / Перевод с английского Евстифеева А.В. – М.: Издательский дом «Додэка-XXI», 2010. – 84 с.: ил.