





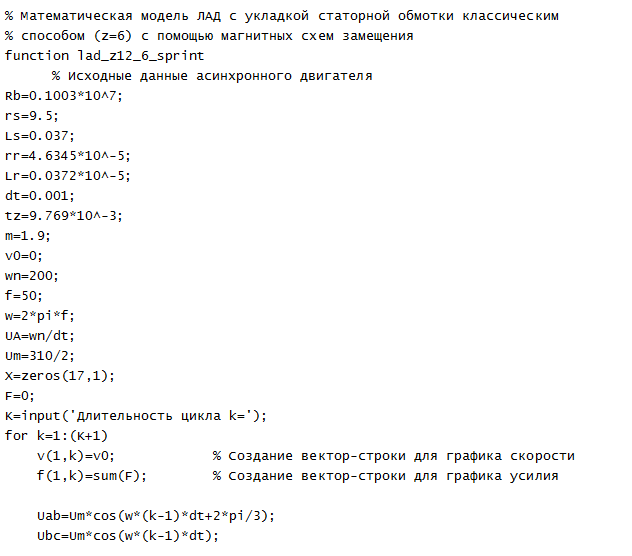
В данной работе объектом рассмотрения является линейный асинхронный двигатель с числом пазов индуктора равным шести (Z1 = 6), математическая модель которого реализована в MATLAB [5].
На рис. 1,а приведен линейный асинхронный двигатель с одной парой полюсов (2р = 2) и с одним числом на полюс и фазу (q = 1). На рис. 1,б дана его магнитная схема замещения. Расчетная модель представляет собой совокупность развернутых схем замещения магнитной и электрических цепей с частично постоянной аппроксимацией параметров в пределах зубцового деления, которое принимается за основу при разбиении магнитной цепи на участке [1].
При рассмотрении линейного асинхронного двигателя приняты следующие основные допущения:
- магнитная проницаемость стальных участков магнитопроводов индуктора и подвижной части (зубцов, ярма) принимается равной бесконечности (µ = ∞). В магнитной схеме замещения (рис. 2) учитывается только магнитные сопротивления воздушных участков в зоне индуктора и в шунтирующих зонах;
- в шунтирующих зонах как под сбегающим, так и набегающим краем индуктора (статора) учитывается по четыре зубцовых деления подвижного элемента (ротора).
Представление линейного асинхронного двигателя в виде магнитных схем замещения приводит к необходимости работать с матрицами, что представляет большую ценность для подготовки студентов младших курсов к исследовательской работе. Данная работа адресована студентам, поэтому из методических целей представлена без сокращений.
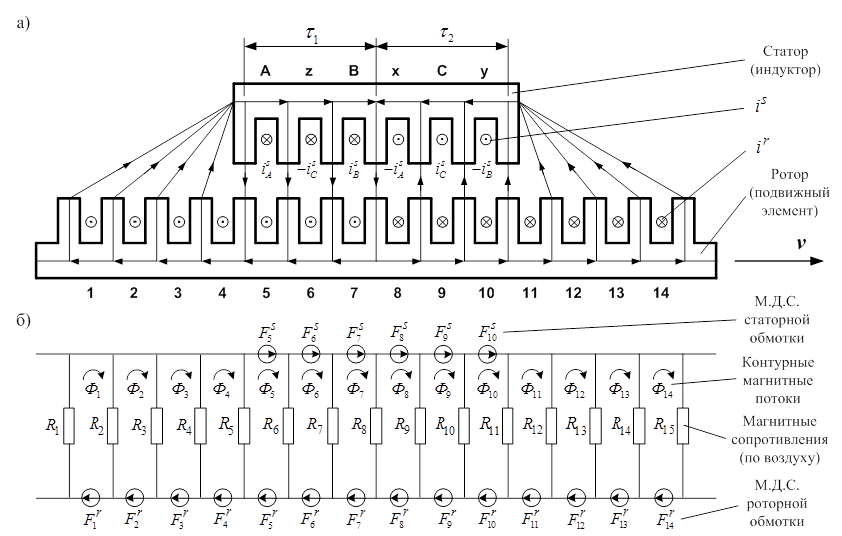
Рис. 1. а) Линейный асинхронный двигатель (2р = 2, Z1 = 6); б) Магнитная схема замещения
Запишем основные уравнения для «n»-ого участка схемы замещения.
Баланс магнитных напряжений магнитной цепи

 – контурные магнитные потоки;
– контурные магнитные потоки;
 – магнитные сопротивления воздушных участков;
– магнитные сопротивления воздушных участков;
 – магнитодвижущая сила, созданная статорным током
– магнитодвижущая сила, созданная статорным током  , протекающим по всем проводникам паза (
, протекающим по всем проводникам паза ( );
);
 – М.Д.С. тока ротора в стержне (
– М.Д.С. тока ротора в стержне ( );
);
 – в шунтирующих зонах.
– в шунтирующих зонах.
Баланс М.Д.С. для «n»-го участка имеет следующий вид:
 .
.
Отсюда ток в стержне ротора определится по следующему выражению:
|
|
(1) |
 .
.Уравнение баланса напряжений электрической цепи ротора
|
|
(2) |

Выразим производные во времени через конечные разности:
 ,
,
где n – номер зубцового деления;
k – номер шага разбиения по времени.
В формуле (2) скорость подвижного элемента принимаем равным  и в пределах «k» интервала считается постоянным.
и в пределах «k» интервала считается постоянным.
Производные по пространственной координате «х» выразим через центральные конечные разности:
 .
.
С учетом вышеприведенных замечаний уравнение (2) примет следующий вид:
|
|
(3) |

Исключим из уравнения (3) токи в роторе. Для этого подставим выражение (1) в уравнение (3) и получим:
|
|
(4) |
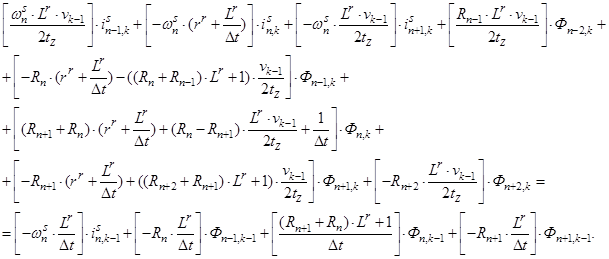
Это уравнение может быть реализовано при произведении матрицы А, элементы которой записаны в квадратных скобках, на матрицу-столбец X, состоящей из потоков (Ф) и токов статорной обмотки. Правая часть уравнения (4) формирует первые четырнадцать элементов матрицы-столбца свободных членовS в (k-1) момент времени. Элементы 15 и 16 строк матрицы А и соответствующие элементы s15 и s16 будут сформированы из баланса напряжений статорной обмотки.
Наконец, последние элементы матриц А и S определятся из баланса токов в трехфазной обмотке соединенной в звезду без нулевого провода. Матрица-столбец Х сформирована из первых четырнадцати элементов, соответствующих потокам Ф1, … , Ф14, а остальные – токам статорной обмотки iАs, iСs и iВs.
Общий вид матриц при числе полюсов 2р = 2 и общем числе пазов индуктора (статора) Z1 = 6 приведен на рис.3.
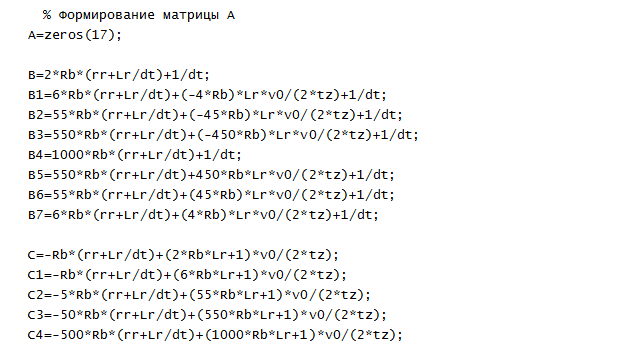
Введем следующие обозначения:
- Магнитные сопротивления в шунтирующих зонах:
R1 = R2 = R14 = R15 = 500∙Rδ;
R3 = R13 = 50∙Rδ;
R4 = R12 = 5∙Rδ.
- Магнитные сопротивления в индукторной зоне:
R5 = R6 = … = R11 = Rδ.
- Элементы матрицы А, перемножаемые на потоки матрицы-столбца Х:

|
Матрица А |
Х |
S |
||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
||
|
1 |
a1,1 |
a1,2 |
a1,3 |
× |
x1 = Ф1 |
= |
s1 |
|||||||||||
|
2 |
a2,1 |
a2,2 |
a2,3 |
a2,4 |
x2 = Ф2 |
s2 |
||||||||||||
|
3 |
a3,1 |
a3,2 |
a3,3 |
a3,4 |
a3,5 |
x3 = Ф3 |
s3 |
|||||||||||
|
4 |
a4,2 |
a4,3 |
a4,4 |
a4,5 |
a4,6 |
a4,15 |
x4 = Ф4 |
s4 |
||||||||||
|
5 |
a5,3 |
a5,4 |
a5,5 |
a5,6 |
a5,7 |
a5,15 |
a5,16 |
x5 = Ф5 |
s5 |
|||||||||
|
6 |
a6,4 |
a6,5 |
a6,6 |
a6,7 |
a6,8 |
a6,15 |
a6,16 |
a6,17 |
x6 = Ф6 |
s6 |
||||||||
|
7 |
a7,5 |
a7,6 |
a7,7 |
a7,8 |
a7,9 |
a7,15 |
a7,16 |
a7,17 |
x7 = Ф7 |
s7 |
||||||||
|
8 |
a8,6 |
a8,7 |
a8,8 |
a8,9 |
a8,10 |
a8,15 |
a8,16 |
a8,17 |
x8 = Ф8 |
s8 |
||||||||
|
9 |
a9,7 |
a9,8 |
a9,9 |
a9,10 |
a9,11 |
a9,15 |
a9,16 |
a9,17 |
x9 = Ф9 |
s9 |
||||||||
|
10 |
a10,8 |
a10,9 |
a10,10 |
a10,11 |
a10,12 |
a10,16 |
a10,17 |
x10 = Ф10 |
s10 |
|||||||||
|
11 |
a11,9 |
a11,10 |
a11,11 |
a11,12 |
a11,13 |
a11,17 |
x11 = Ф11 |
s11 |
||||||||||
|
12 |
a12,10 |
a12,11 |
a12,12 |
a12,13 |
a12,14 |
x12 = Ф12 |
s12 |
|||||||||||
|
13 |
a13,11 |
a13,12 |
a13,13 |
a13,14 |
x13 = Ф13 |
s13 |
||||||||||||
|
14 |
a14,12 |
a14,13 |
a14,14 |
x14 = Ф14 |
s14 |
|||||||||||||
|
15 |
a15,5 |
a15,7 |
a15,8 |
a15,10 |
a15,15 |
a15,17 |
x15 = iАS |
s15 |
||||||||||
|
16 |
a16,6 |
a16,7 |
a16,9 |
a16,10 |
a16,16 |
a16,17 |
x16 = iСS |
s16 |
||||||||||
|
17 |
a17,15 |
a17,16 |
a17,17 |
x17 = iВS |
s17 |
|||||||||||||
Рис. 3. Общий вид матриц A, X и S.
























- Элементы матрицы А, перемножаемые на токи i1, … , i6 матрицы Х:
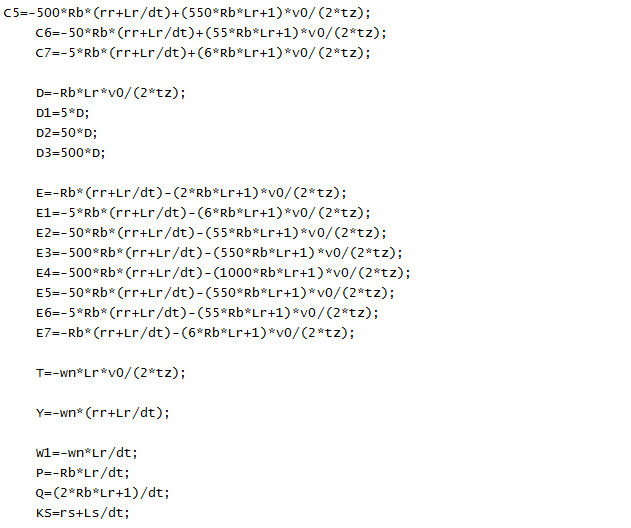
- Элементы матрицы-столбца свободных членов S:

Уравнение (4) позволит определить для первых четырнадцати строк элементы матрицы А и с первый по четырнадцатый элементы матрицы-столбца S, для этого последовательно зададимся n:
n = 1.

Запишем элементы матрицы А:
 ;
;  ;
;  .
.
В правой части сформирован элемент  матрицы-столбца S:
матрицы-столбца S:

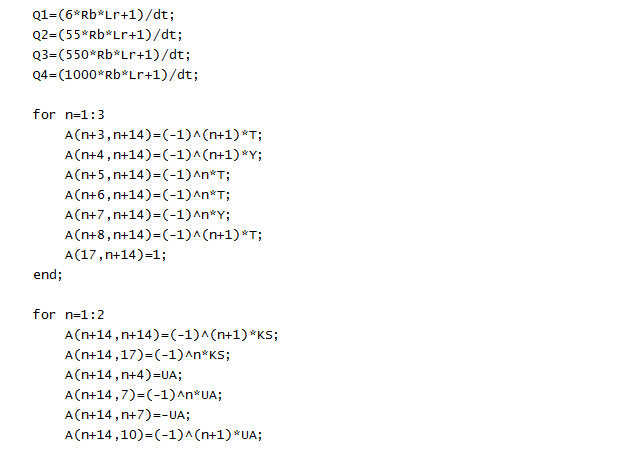
Примечание: вначале матрица А предстанет «пустой» и после каждой операции n = … определятся постепенно элементы для каждой строки и только в конце всех операций матрица А предстанет перед читателем в том виде как она дана на рис. 3. Но эта «пустая» матрица А уже должна быть подготовлена. Эта «пустая» форма направляет, выступает «организующим началом» по поиску элементов в каждой строке.
При n = 1, как было показано выше, определились элементы первой строки. Найденные коэффициенты вписываем в матрицу А. В дальнейшем становится понятным алгоритм заполнения матрицы.
n = 2.

 ;
;  ;
;  ;
;  .
.

n = 3.


 ;
;  ;
;  ;
;  ;
; 

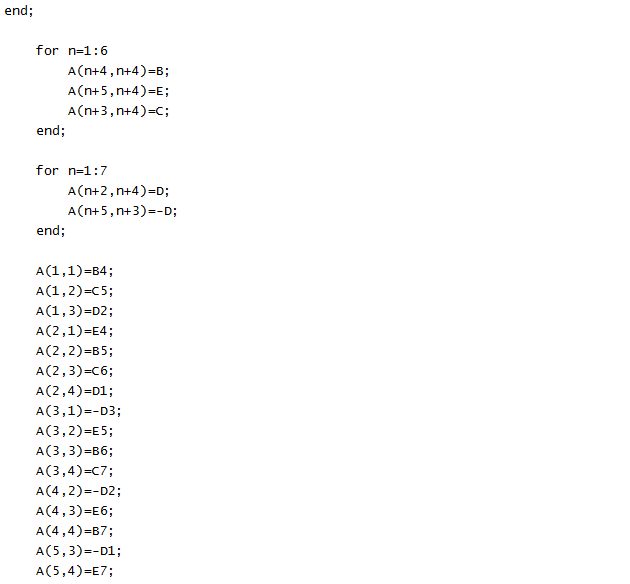
n = 4.


 ;
;  ;
;  ;
;  ;
;  ;
; 
 .
.
Примечание: при подстановке в уравнение (4) n = 5, мы увидим в соответствии с рис. 1, что войдет ток iСS с отрицательным знаком, в то же время в матрице-столбце Хнет знака «–» , поэтому его необходимо учесть в соответствующем элементе матрицы А.
Аналогично для других фаз, в концах обмоток x, y, z условно принимаем знак «–» и этот знак вводим в соответствующие элементы матрицы А.
n = 5.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
; 

n = 6.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 

n = 7.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 

n = 8.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 

n = 9.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
; 

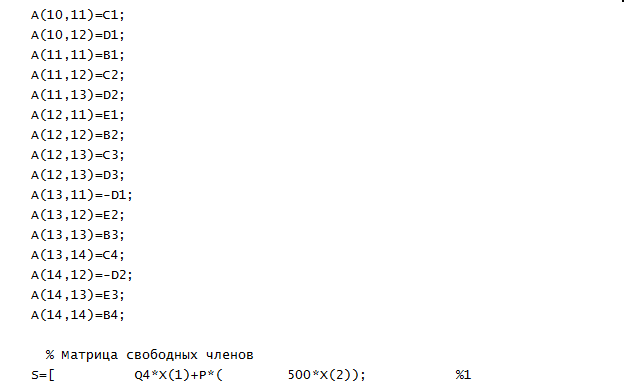
n = 10.


 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  .
.

n = 11.

 ;
;  ;
;  ;
;  ;
;  ;
;  .
.

n = 12.


 ;
;  ;
;  ;
;  ;
;  .
.

n = 13.


 ;
;  ;
;  ;
;  .
.

n = 14.

 ;
;  ;
; 

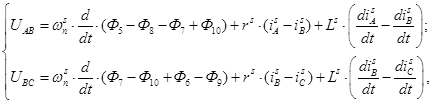
Элементы строк 15 и 16 матрицы А и соответствующие элементы матрицы-столбца S определяются из баланса электрических напряжений обмоток статора [2].
|
|
(5) |
где 
С учетом шага по времени ∆t в k-ый момент времени:
Уравнения (5) при выражении производных по времени через конечные разности примут следующий вид:
n = 15.


n = 16.


Наконец, сумма токов определяет элементы семнадцатой строки матрицы А и элемент s17 матрицы-столбца S.
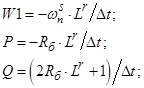
Окончательно, матрица А примет следующий вид, удобный для программирования в MATLAB:
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
|
|
1 |
B4 |
C5 |
D2 |
||||||||||||||
|
2 |
E4 |
B5 |
C6 |
D1 |
|||||||||||||
|
3 |
-D3 |
E5 |
B6 |
C7 |
D |
||||||||||||
|
4 |
-D2 |
E6 |
B7 |
C |
D |
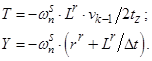
T |
|||||||||||
|
5 |
-D1 |
E7 |
B |
C |
D |
Y |
-T |
||||||||||
|
6 |
-D |
E |
B |
C |
D |
-T |
-Y |
T |
|||||||||
|
7 |
-D |
E |
B |
C |
D |
-T |
T |
Y |
|||||||||
|
8 |
-D |
E |
B |
C |
D |
-Y |
T |
-T |
|||||||||
|
9 |
-D |
E |
B |
C |
D |
T |
Y |
-T |
|||||||||
|
10 |
-D |
E |
B |
C1 |
D1 |
-T |
-Y |
||||||||||
|
11 |
-D |
E |
B1 |
C2 |
D2 |
T |
|||||||||||
|
12 |
-D |
E1 |
B2 |
C3 |
D3 |
||||||||||||
|
13 |
-D1 |
E2 |
B3 |
C4 |
|||||||||||||
|
14 |
-D2 |
E3 |
B4 |
||||||||||||||
|
15 |
U |
-U |
-U |
U |
KS |
-KS |
|||||||||||
|
16 |
U |
U |
-U |
-U |
-KS |
KS |
|||||||||||
|
17 |
1 |
1 |
1 |
Неизвестные переменные (потоки и токи в статорной обмотке) в k-й момент времени определяются в результате следующей операции с матрицами:
X=A-1·S,
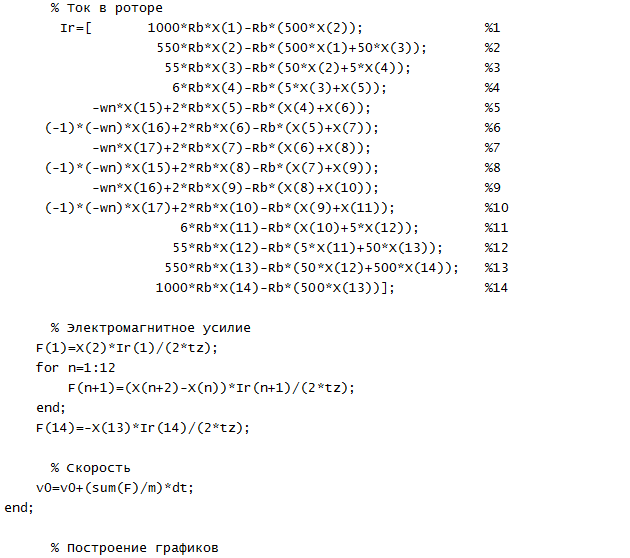
Далее, подставляя в уравнение (1) n = 1…14, определяем токи в роторе:














Электромагнитные усилия на зубцовом делении определяются по следующим формулам:


Суммарное усилие:  .
.
Скорость в k-й момент времени: 
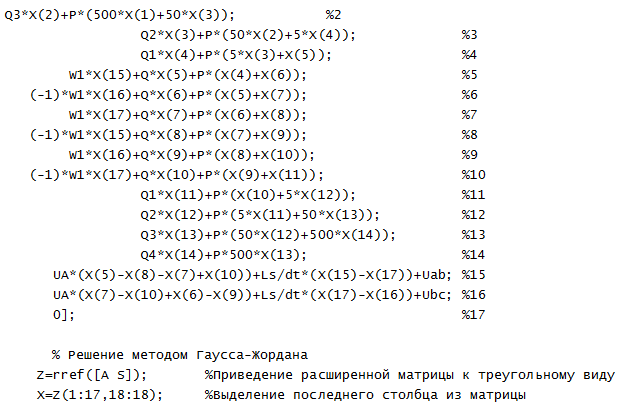
Математическая модель линейного асинхронного двигателя реализована в программном пакете MATLAB методом Гаусса-Жордана. Ниже приведен пример расчета.

Временные зависимости скорости и электромагнитного усилия линейного асинхронного двигателя в режиме прямого пуска, полученные на математической модели, представлены на рис.4.
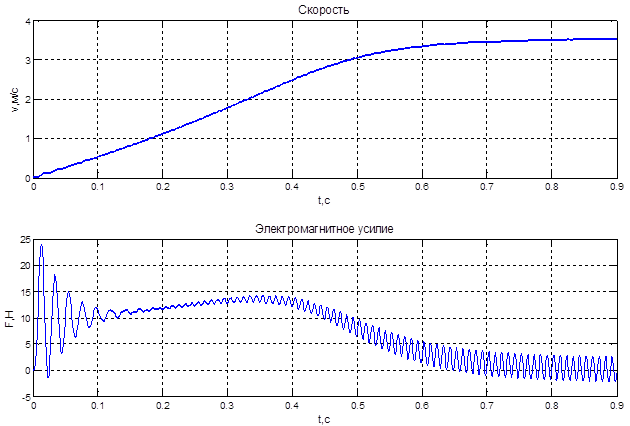
Рис.4. Результат моделирования линейного асинхронного двигателя
в режиме прямого пуска
Литература:
1. Сарапулов Ф.Н., Емельянов А.А., Иваницкий С.В., Резин М.Г. Исследование электромеханических переходных процессов линейного асинхронного короткозамкнутого двигателя // Электричество. – 1982. – №10. – С. 54–57.
2. Емельянов А.А., Богатов Е.А., Клишин А.В., Медведев А.В., Симонович В.Г. Математическая модель линейного асинхронного двигателя на основе магнитных схем замещения // Молодой ученый. – 2010. – №5. – С.14–22.
3. Емельянов А.А., Медведев А.В., Богатов Е.А., Кобзев А.В., Бочкарев Ю.П. Программирование линейного асинхронного двигателя в MATLAB // Молодой ученый. – 2013. – №3. – С. 129-143.
4. Емельянов А. А., Медведев А. В., Кобзев А.В., Евдокимов О.В., Габзалилов Э.Ф., Авдеев А.С. Моделирование асинхронного двигателя с укладкой обмотки статора (Z1 = 6) через спинку ярма // Молодой ученый. – 2013. – №6. – С. 1-11.
5. Ануфриев И.Е. и др. MATLAB 7 / Ануфриев И.Е., Смирнов А.Б., Смирнова Е.Н.. – СПб.: БХВ-Петербург, 2005. – 1104 с.
