





В работе получены уравнения движения механических систем, стесненных геометрическими и кинематическими сервосвязями, а также рассматриваются вопросы их устойчивости.
Пусть механическая система, положение которой определяется обобщенными координатами q1, …,qn, стеснена неголомными идеальными связями:
 (1)
(1)
а также сервосвязями вида
 (2)
(2)

Предполагается, что среди возможных перемещений, допускаемых связями (1) имеются такие, определяемые уравнениями:
 (3)
(3)
на которых реакции сил реакций связей второго рода работы не производят /1/. Имея в виду параметрическое освобождение системы от сервосвязей /2, 3/ введем дополнительные независимые параметры hр,  , соответствующие преобразованию системы с сервосвязями (2) к виду:
, соответствующие преобразованию системы с сервосвязями (2) к виду:
 (4)
(4)
где hp, — параметры, характеризирующие освобождение системы от первой и второй групп сервосвязей (2)
Обозначив через Np и Ps принуждения реакций, отнесенные к параметрам hр, , будем предполагать, что последние вынужденно изменяются согласно дифферинциальным уравнениям /3/.
 ,
,  (р=1,…,а,
(р=1,…,а,  =1,…,с) (5)
=1,…,с) (5)
С учетом первых групп уравнений (2), (4) вместо обобщенных координат  введем параметры
введем параметры  . Соотношениями, тождественно удовлетворяющими уравнениям (1) и второй группе (4) введем скоростные параметры ev /5/:
. Соотношениями, тождественно удовлетворяющими уравнениям (1) и второй группе (4) введем скоростные параметры ev /5/:
 (6)
(6)
где

и за а+с=к скоростных параметров ev выберем hр, . Тогда уравнения (3) в неголономных координатах будут иметь вид
 (7)
(7)
где pn — квазикоордината, соответствующая квазискорости en/5/. Из преобразованного общего уравнения динамики /5/
на (А) — перемещениях (7) получим уравнения движения с множителями сервосвязей:
 (8)
(8)
где S — энергия ускорений системы; lq — множители сервосвязей.
Предположим, что все связи, налагаемые на систему, стационарны. Тогда энергия ускорений параметрически освобожденной системы будет иметь вид
 ,
,
где [n, m, m]- символы Кристоффеля первого рода /5/.
Записывая последнее выражение в развернутом виде через а квазискоростей ha, с квазискоростей и n-k-bквазискоростей еk+rиформируя реакция связей второго рода по законам:



где  — положительные постоянные; нолик наверху соответствует невозмущенному движению. Подставляем их в уравнения (8). Далее из п-к-в уравнений полученной системы определяя
— положительные постоянные; нолик наверху соответствует невозмущенному движению. Подставляем их в уравнения (8). Далее из п-к-в уравнений полученной системы определяя  и подставляя их в (а+с) уравнений полученной системы, получим уравнения возмущенного движения:
и подставляя их в (а+с) уравнений полученной системы, получим уравнения возмущенного движения:
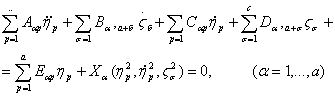
 (9)
(9)
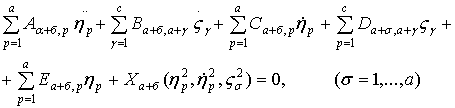
где Aap, Ba,а+б, Сaр, Da,а+б, Еaр, Аа+б,р, Ва+б,а+р, Са+б,р, Dа+б, а+р, Еа+б, р -некоторые функции hр, zб, ек+р. Устойчивость невозмущенного движения hр=0, =0 будем исследовать используя методы исследований устойчивости неустановившихся систем /7/. Эти условия имеют вид
 (10)
(10)
где  — главные диагональные миноры
— главные диагональные миноры  квадратичной формы
квадратичной формы
Так как eik (i,k=1,…,c1) являются переменными, то для определенной отрицательности (dv/dt), вообще говоря, недостаточно выполнения условий (9). Неравенства Сильвестра должны выполнятся равномерно по всем Xi, t, т. е. следует потребовать выполнения неравенств:
 (11)
(11)
Условия (10) и (11) выражают условия асимптотической устойчивости системы (9).
Пример. Рассмотрим задачу о качении без скольжения однородного шара радиуса R по материальной плоскости Р. Сохраняя обозначения ([1], п. 21), будем предполагать, что плоскость Р, на которую действуют силы реакции сервосвязей, имеет массу m1.
На систему, движение которой стеснено связями первого рода
 (12)
(12)
должны быть наложены сервосвязи
 (13)
(13)
Наряду с (13) в системе удовлетворяются соотношения
 (14)
(14)
где z1×z2 — параметры, характеризующие освобождение системы от сервосвязей (13). Соотношениями
 ,
, 
 ,
, 

тождественно удовлетворяющими условиями (12) и (14), введем скоростные параметры  . Преобразуя энергию ускорений к этим переменным и составляя уравнения движения в форме (8), получим
. Преобразуя энергию ускорений к этим переменным и составляя уравнения движения в форме (8), получим
 ,
,
 ,
,
 (15)
(15)
где l1,l2 — силы реакций сервосвязей.
К системе (15) присоединяем уравнения
z1= — К1z1-К2z2, z2= — К3z1-К4z2
где К1, К2, К3, К4 — некоторые постоянные.
Если реакции сервосвязей l1 и l2 формировать по законам:
l1=m2p1 — mw2x — k 1z1– k2z2,l2=m2p2 — mw2h — k 3z1– k4z2
то, поставляя их в (15) относительно z1, z2, получим систему
 ,
,  (16)
(16)
где 
Так как система (16) представляет собой систему дифференциальных уравнений с постоянными коэффициентами, то условия устойчивости ее нулевого решения z1=0, z2=0 могут быть найдены теоремой Гурвица [6].
Эти условия имеют вид:
 Ќ4>0 (17)
Ќ4>0 (17)
Условия (17) показывают, что необходимые и достаточные условия устойчивого осуществления сервосвязей (13) зависят лишь от выбора постоянных Ḱ1, Ḱ2, Ḱ3 и Ќ4..
Литература:
1. Беген А. Теория гигроскопических компасов. М.Наука, 1967.
2. Азизов А. Г. Об уравнениях динамики систем с сервосвязями. Научные труды. ТашГУ. 1975. вып. 476.
3. Азизов А. Г. Прикладные задачи динамики управляемых систем. Учебное пособие, Ташкент, 1980.
4. Румянцев В. В. О движении некоторых систем с неидеальными связями. Вестник МГУ. Сер. Матем. Механ. 1961.
5. Лурье А. И. Аналитическая механика. М. Физматгиз. 1961.
6. Маркен Г. Д. Введение в теорию устойчивости. — М.: Наука, 1987.
7. Красовский Н. Н. Некоторые задачи теории устойчивости движения. — М.: Физматгиз, 1959.
