





Водозабор — это комплекс гидротехнических сооружений, включающий водоприемник, оборудование предварительной очистки (решетки, сетки), насосную станцию первого подъема [1].
При управлении насосной станцией используются автоматизированная система управления (АСУ) которая предназначена для:
- автоматического управления работой скважин первого подъема по уровню в резервуарах чистой воды (РЧВ);
- автоматического поддержания заданного давления воды в коллекторе;
- автоматического выбора скважин на включение и выключение по результатам определения удельных затрат электроэнергии по скважинам, выработки ресурса, а также контроль времени простоя скважины;
- обеспечения передачи данных со скважин на автоматизированное место диспетчера (АРМ) водозабора;
- выявления аварийных ситуаций и/или неисправностей технологического оборудования с выдачей аварийно-предупредительной сигнализации и с занесением в журнал событий и др.
В автоматическом режиме АСУ работает в соответствии с заданным алгоритмом работы, поддерживая давление в напорном коллекторе, изменяя производительность насоса, путем регулирования частоты вращения асинхронного двигателя. В качестве сигнала обратной связи используется аналоговый сигнал 4–20 мA датчика давления, установленного после напорной задвижки (или в коллекторе).
Правильная настройка процессов управления насосной станцией является основой качественного водоснабжения потребителя. Она производятся в соответствии логической структурой управления представленной на рисунке 1.
Настройка разгона и торможения двигателя осуществляться в соответствии с заданной скоростью. Для этого весь диапазон изменения выходной частоты (от 0 до максимальной частоты преобразователя) разбивается на 4 диапазона, границы. Для каждого диапазона устанавливают необходимую скорость разгона и скорость торможения двигателя. Границы интервалов скоростей разгона и торможения задаются произвольно. Если диапазоны пересекаются между собой, или даже совпадают полностью, разгон и торможение на участке пересечения будут осуществляться в соответствии с настройками диапазона с меньшим порядковым номером. Настройка скоростей разгона и торможения оказывает влияние на работу преобразователя частоты во всех режимах работы.
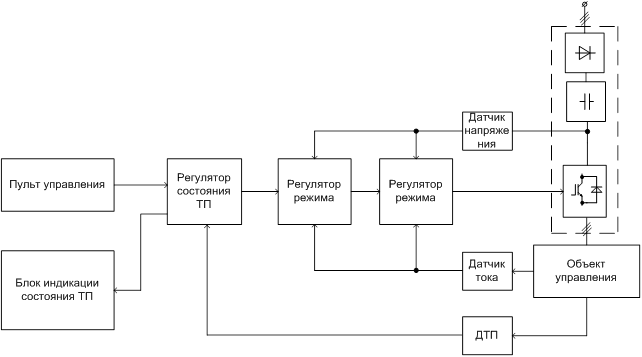 Рис.1. Логическая структура процессов управления
Рис.1. Логическая структура процессов управления
В автоматическом режиме при получении команды «Пуск» с пульта местного управления или пульта дистанционного управления система анализирует разрешающие сигналы на запуск и выполняет определенный жестко регламентированный алгоритм пуска системы.
Уставки задания давления суточного графика (день, вечер, утро, ночь) вводятся в систему управления и корректируются в процессе опытной эксплуатации.
Для автоматического регулирования технологического параметра, часто на практике, используется ПИД-регулятор. Фактическое значение технологического параметра измеряется внешним датчиком. Сигнал обратной связи сравнивается с сигналом задания, и поступает на вход регулятора. На выходе регулятора формируется задание по выходной частоте преобразователя в соответствии с формулой 1.
 , (1)
, (1)
где err(t) — величина рассогласования (разница между заданием и показанием датчика обратной связи), возникает при изменениях задания или нагрузки электропривода;
Кп- коэффициент передачи регулятора, устанавливает пропорциональную зависимость выходного сигнала регулятора от величины рассогласования. Положительное значение КП используется в механизмах, где увеличение регулируемого технологического параметра происходит при увеличении частоты вращения двигателя (например, привода вентиляторов воздуходувок). Отрицательное значение Кп используется в механизмах, где при увеличении частоты вращения происходи снижение регулируемого параметра (например, привода вентиляторов дымососов);
Тинт — постоянная времени интегрирования. Физически Тинт соответствует времени, в течение которого с момента поступления на вход регулятора постоянного сигнала сигнал на выходе регулятора достигнет значения, равного значению входного сигнала;
Тдиф — постоянная времени дифференцирования. Физически Тдиф соответствует интервалу времени, на котором оценивается скорость изменения сигнала рассогласования.
Структурная схема ПИД-регулятора приведена на рисунке 2. Путем изменения настроек ПИД-регулятора можно получать различные структуры регулятора (П-регулятор, ПИ-регулятр и др.).
При выборе структуры регулятора, на насосной станции первого подъема, рекомендуется использовать ПИД-регулятор. Но при этом необходимо учитывать, что на практике настроить ПИД-регулятор значительно сложнее, чем, например, ПИ-регулятор. Также следует учитывать, что наличие шумов в канале измерения в системе с ПД- или ПИД-регулятором приводит к значительным случайным колебаниям выходного сигнала регулятора или даже к неустойчивости системы [2]. При настройке регулятора учитывают, что на его работу оказывает влияние кривая разгона/торможения (скорость изменения сигнала задания частоты на выходе регулятора ограничивается в соответствии с характеристикой разгона/торможения для соответствующего диапазона). Также выходная частота, формируемая ПИД-регулятором, ограничена минимальной и максимальной частотой, задаваемой в меню преобразователя или на входах «сухой контакт». При ограничении выходной частоты возможно возникновение ситуации, когда ПИД-регулятору будет недостаточно заданного диапазона частот для поддержания заданного значения регулируемого параметра.
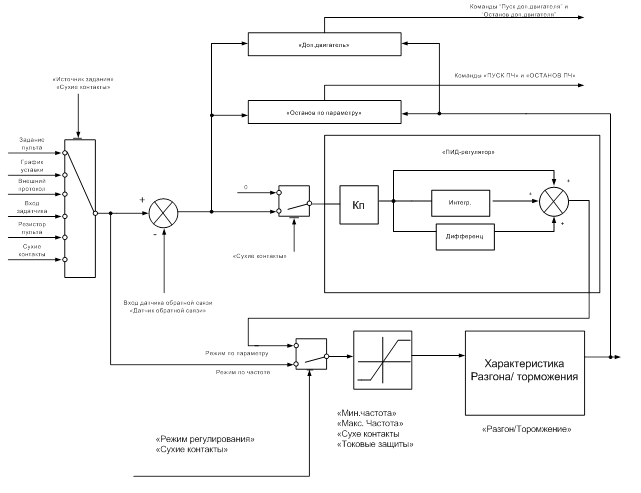 Рис. 2. Функциональная схема ПИД-регулятора
Рис. 2. Функциональная схема ПИД-регулятора
ПИД-регулятор может работать в различных режимах. Настройка режима «Пуск» на вращающийся двигатель обеспечивает автоматическое определение (поиск) скорости двигателя и мягкое включение преобразователя в работу на вращающийся двигатель. Режим «Подхват» может быть востребован при работе электропривода на механизмы с высокими моментами инерции, с активным моментом нагрузки, при кратковременных провалах напряжения [3], когда при кратковременной блокировке преобразователя частоты или срабатыванием защит, не происходит быстрого останова двигателя самовыбегом.
Для осуществления успешного включения на вращающийся двигатель требуется определение скорости вращения двигателя и амплитуды напряжения, необходимого для отсутствия токовой перегрузки. Поиск скорости осуществляется с использованием двух регуляторов — регулятора тока и регулятора частоты. При поступлении команды «Пуск» и ненулевом значении задания частоты или параметра (в зависимости от выбранного режима регулирования) выходная частота преобразователя устанавливается в максимально возможное значение 65,5 Гц независимо от настройки максимальной частоты «Основные параметры», при этом амплитуда напряжения минимальна. Далее регулятором частоты производится плавное снижение частоты, а регулятором тока — плавное повышение напряжения при поддержании тока на уровне, определенном в настройках регулятора тока подхвата. Когда, при заданном токе, выходное напряжение и частота установятся на значениях, соответствующих настройке характеристики U/f или при снижении выходной частоты до 1 Гц, то поиск скорости выполнен успешно, и преобразователь переходит в штатный режим работы согласно установленным настройкам.
Для настройки функции поиска скорости необходимо включить следующие параметры:
- подхват включен — установка разрешения использования функции подхвата (поиска скорости) при пуске преобразователя. При включенном подхвате поиск скорости будет осуществляться всегда при поступлении команды «Пуск»;
- коэффициент регулятора тока — коэффициент регулирования тока двигателя в режиме подхвата. Коэффициент определяет скорость реакции регулятора тока двигателя на отклонение тока от заданного значения в режиме подхвата. Возможно задание коэффициента в диапазоне от 1 до 999 %. Увеличение коэффициента соответствует повышению скорости реакции, однако может привести к неустойчивой работе привода в режиме подхвата;
- коэффициент регулятора частоты — коэффициент регулирования выходной частоты преобразователя в режиме подхвата. Определяет максимальную скорость снижения выходной частоты преобразователя при поиске частоты вращения двигателя. Возможно задание коэффициента в диапазоне от 1 до 999 %. Увеличение коэффициента соответствует повышению скорости поиска частоты, однако может привести к неустойчивой работе привода в режиме подхвата;
- амплитуда тока — коэффициент, определяющий значение тока двигателя (в процентах от номинального), которое будет поддерживаться регулятором тока при поиске частоты вращения. Возможно задание амплитуды тока в диапазоне от 30 до 199 %.
В случае возникновения аварийной ситуации преобразователь частоты отключается и происходит автоматический перезапуск системы. После устранения аварийной ситуации (например, восстановление напряжения питающей сети после провала напряжения), преобразователь должен автоматически перезапустить двигатель. Автоматический перезапуск возможен только при наличии неиспользованных попыток перезапуска и после истечении всех необходимых временных задержек:
- попытки перезапуска — количество попыток перезапуска двигателя;
- время восстановления — время нормальной работы привода после автоматического перезапуска, по истечении которого будет обнулен счетчик использованных попыток перезапуска;
- пауза штатного останова — время паузы после штатного останова двигателя по командам «останов». Пуск двигателя после штатного останова может быть осуществлен только по истечении этого времени;
- пауза после аварии — время паузы после аварийного останова двигателя в случае возникновения аварийной ситуации кроме аварии тепловой защиты. Автоматический перезапуск двигателя будет осуществляться только после истечения этого времени;
- пауза тепловой аварии — время паузы после аварии тепловой защиты двигателя. Автоматический перезапуск двигателя после возникновения такой аварии будет осуществляться только после истечения этого времени.
При нажатии кнопки «Пуск» поступает сигнал на контроллер о запуске системы и при отсутствии аварии, а также при закрытой напорной задвижке, контроллер дает команду на открытие электромеханической задвижки на всасе насоса. В процессе ее открытия вода из РЧВ, поступая во всасывающий коллектор насоса, создаст давление, что обеспечит срабатывание реле давления.
Изменение уставки по давлению осуществляется по разработанному алгоритму, приведенному в работе [3], в соответствии с рисунком 3. Данный алгоритм применяется в аварийных режимах рассматриваемой станции. При устранении аварии полностью открывается задвижка и дается разрешение преобразователю частоты (ПЧ) от системы управления на пуск электродвигателя. ПЧ начнет разгонять электродвигатель насоса в течение заранее запрограммированного времени (0–60000 секунд).
В процессе разгона насосного агрегата логический контроллер анализирует сигналы, получаемые с датчиков давления: Р1- давление перед напорной задвижкой, Р2- давление в напорном коллекторе. В момент, когда показания давлений сравняются, поступит команда на открытие напорной задвижки, и дальнейшая работа насоса происходит при полностью открытых задвижках, как на всасе, так и в нагнетании показанных на рисунке 4.
Автоматическое поддержание давления в напорном коллекторе осуществляется сигналом обратной связи 4–20 мА датчика давления Р2. С целью осуществления дополнительного контроля на выходе насосного агрегата необходимо устанавит дублирующий датчика давления. Его применение повысит надежность работы системы в целом, так как при выходе из строя (обрыве кабеля) основного датчика, его показания дублируются, что обеспечивает выход системы на заданные характеристики.
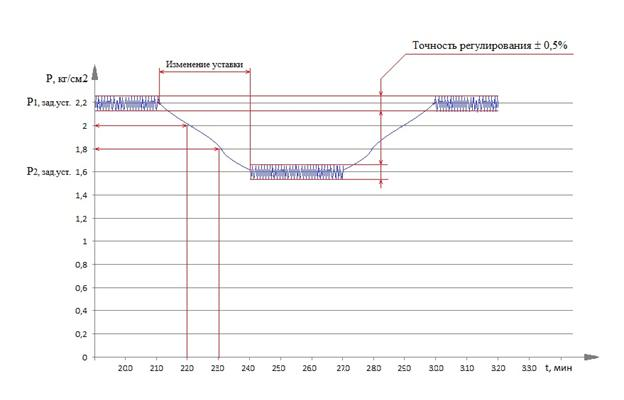
Рис. 3. Изменение уставки оператором
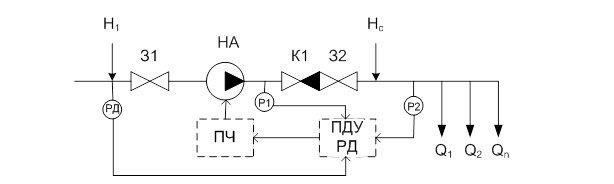
Рис. 4. Структурная схема АСУ насосной станции первого подъема; З1, З2 — запорные технологические задвижки; К1 — обратный клапан; Р1, Р2 — датчик давления; ПЧ — преобразователь частоты; РД — реле давления (датчик сухого хода); ПДУ РД — пульт дистанционного управления, регулятор давления; НА — насоный агрегат.
Разработанная структурная схема АСУ позволяет однозначно определить завоздушивание работающего насосного агрегата по показаниям датчиков на всасе и на выходе насосного агрегата, а также по реальному потреблению мощности и частоте вращения двигателя. В случае обнаружения завоздушивания система выдает соответствующие сигналы в АСУ ТП.
Таким образом разработанная методика позволяет повысить быстродействие и надежность работы автоматизированной системы управления насосной станции первого подъема водозабора.
Литература:
1. Павлинова И. И. Водоснабжение и водоотведение: учебник для бакалавров / И. И. Павлинова, В. И. Баженов, И. Г. Губий. — 4-е изд., перераб. И доп.- М.: Изд-во Юрайт, 2012.- 472 с.
2. Темирев А. П. Разработка проблемно-ориентированных компонентов электротехнических комплексов дизель-электрической подводной лодки и систем управления ими: диссертация... доктора технических наук: 05.09.03 Новочеркасск, 2006 466 c.
3. Тугов А. В. Разработка алгоритма удержания и повторного пуска насосного агрегата первого подъема водозабора / А. В. Тугов, В. В. Тугов, И. А. Прохожев // Молодой ученый. — 2014.- № 7. C. 185–188.
