





Нейро-нечеткие системы объединяют в себе достоинства нейронных сетей и классических нечетких систем. В отличие от нейронных сетей, нейро-нечеткие системы характеризуются четким представлением знаний, содержащихся в нечетких правилах. Также нейро-нечеткие сети можно обучать с помощью метода обратного распространения ошибки (основа обучения многослойных нейронных сетей) и эволюционных алгоритмов. Обучению чаще всего подвергаются параметры функций принадлежности суждений (компонент ЕСЛИ...) и заключений (компонент ТО...) нечетких правил. Перечисленные достоинства нейро-нечетких систем обусловили их широкое применение для решения задач моделирования, аппроксимации и классификации. В большинстве таких систем используется вывод типа Мамдани или логического типа.
Способ вывода (Мамдани или логический) может быть определен в процессе обучения. Такие системы называются гибкими нейро-нечеткими системами. Структура гибких систем изменяется в процессе обучения.
В этой статье рассматриваются нейро-нечеткие системы вывода с множеством входов и одним выходом, отображающие  , где
, где  и
и  [1]. Система (рис.1) состоит из фуззификатора, базы нечетких правил, нечеткого логического вывода и дефуззификатора.
[1]. Система (рис.1) состоит из фуззификатора, базы нечетких правил, нечеткого логического вывода и дефуззификатора.

Рис. 1. Нечеткая система вывода
Система управления с нечеткой логикой оперирует нечеткими множествами. Поэтому конкретное значение  входного сигнала модуля нечеткого управления подлежит операции фуззификации, в результате которой ему будет сопоставлено нечеткое множество
входного сигнала модуля нечеткого управления подлежит операции фуззификации, в результате которой ему будет сопоставлено нечеткое множество  . Чаще всего применяется операция фуззификации типа «синглтон»:
. Чаще всего применяется операция фуззификации типа «синглтон»:
 (1)
(1)
Нечеткая база правил состоит из набора N нечетких ЕСЛИ-ТО правил вида:
 , (2)
, (2)
где  — нечеткие множества
— нечеткие множества
Правило (2) можно представить в виде нечеткой импликации
 .
.
Правило  можно интерпретировать как нечеткое отношение, определенное на множестве
можно интерпретировать как нечеткое отношение, определенное на множестве  , т. е.
, т. е.  — это нечеткое множество с функцией принадлежности
— это нечеткое множество с функцией принадлежности
 . (3)
. (3)
Нечеткий вывод определяется как отображение нечетких множеств входного пространства  на нечеткое множество выходного пространства
на нечеткое множество выходного пространства  . Предположим, что на вход блока выработки решения подано нечеткое множество
. Предположим, что на вход блока выработки решения подано нечеткое множество  Каждое из
Каждое из  правил определяется выходным нечетким множеством
правил определяется выходным нечетким множеством  , полученным с помощью композиционного правила вывода:
, полученным с помощью композиционного правила вывода:
 .
.
Нечеткие множества  , в соответствии с формулой (3) характеризуются функцией принадлежности:
, в соответствии с формулой (3) характеризуются функцией принадлежности:
 (4)
(4)
где  может быть любым оператором из класса Т-норм. Заметим, что при использовании операции фуззификации типа «синглтон»(1), формула (4) принимает вид:
может быть любым оператором из класса Т-норм. Заметим, что при использовании операции фуззификации типа «синглтон»(1), формула (4) принимает вид:
 ,
,
где  — «инженерная импликация» или нечеткая импликация.
— «инженерная импликация» или нечеткая импликация.
Оператор агрегации, применяемый для того, чтобы получить нечеткое множество  из нечетких множеств — это оператор Т-нормы или Т-конормы в зависимости от типа нечеткой импликации.
из нечетких множеств — это оператор Т-нормы или Т-конормы в зависимости от типа нечеткой импликации.
Дефуззификатор представляет отображение нечеткого множества в точку  из
из  Существует несколько методов дефуззификации. Например, метод дефуззификации по максимуму функции принадлежности:
Существует несколько методов дефуззификации. Например, метод дефуззификации по максимуму функции принадлежности:
 .
.
Далее рассмотрим общую схему нейро-нечеткой системы вывода [3].

Рис. 2. Структура нейро-нечеткой сети
Она включает оба типа вывода — Мамдани и логический:

где

и


При использовании модели Мамдани и логического типа полученные результаты будут отличаться. В статье предложено использовать гибкую нейро-нечеткую систему типа «И», которая представляет собой следующую комбинацию «инженерной» и нечеткой импликации:

Параметр  находится в процессе обучения и может принимать значения из интервала [0;1].
находится в процессе обучения и может принимать значения из интервала [0;1].
Тогда нейро-нечеткая система примет вид:



Отметим, что при  получаем нейро-нечеткую систему Мамдани, а при
получаем нейро-нечеткую систему Мамдани, а при  — логического типа.
— логического типа.
Обучение нейро-нечеткой сети осуществляется с использованием генетического алгоритма [2], который позволяет избежать трудностей, присущих градиентным методам.
Для обеспечения выполнения принципа обобщения используем треугольные нечеткие величины. При данном подходе вид функции принадлежности однозначно определяется тройкой параметров [a, b, c]:
Таким образом, хромосома, кодирующая нейро-нечеткую систему, будет иметь вид:
|
a1 |
b1 |
c1 |
… |
aN |
bN |
cN |
|
где ai, bi, ci — параметры функции принадлежности i-ого нечеткого множества,  ; — параметр модели вывода.
; — параметр модели вывода.
Для решения поставленной задачи разработана программная схема, структура которой представлена на рис. 3.
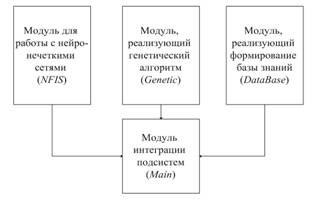
Рис. 3. Функциональная схема программной системы
Модуль для работы с нейро-нечеткими сетями содержит классы, реализующие нечеткие величины, термы, лингвистические переменные, нечеткие правила, а также подпрограммы основных операций с нечеткими величинами, алгоритм нечеткого вывода.
Модуль генетического поиска обеспечивает реализацию генетического алгоритма, кодирование базы правил.
Модуль, реализующий формирование базы знаний, получает на входе обучающие данные и формирует на их основе базу нечетких правил.
Модуль интеграции подсистем реализует основную последовательность действий по выполнению функций системы нечеткого вывода путем вызова соответствующих подпрограмм остальных модулей.
Рассматриваемая нейро-нечеткая система тестировалась на задачах моделирования:
1. статической нелинейной функции: рассматривается аппроксимация нелинейной функции, которая описывается выражением
 .
.
Обучающая последовательность состоит из 100 векторов входных данных и соответствующих им значений функции.
2. динамического нелинейного объекта: поведение объекта описывается функцией
 ,
,
где 
 — выходной сигнал.
— выходной сигнал.
Обучающая последовательность генерируется для нулевого начального состояния. Для обучения нейро-нечеткой системы используется последовательность состояний объекта для синусоидального входного сигнала вида  .
.
Для оценки полученной нейро-нечеткой системы используется среднеквадратичная ошибка (RSME):
где Q — количество наборов в обучающей выборке;  значение выходной переменной в t-ом наборе обучающей выборки,
значение выходной переменной в t-ом наборе обучающей выборки,  ;
;  — результат нечеткого вывода по -ому набору обучающей выборки.
— результат нечеткого вывода по -ому набору обучающей выборки.
Результаты эксперимента представлены в таблице 1.
Таблица 1
Результаты тестирования нейро-нечеткой системы
|
Задача |
Настраиваемые параметры |
Начальное значение |
Конечное значение |
|
|
Статическое моделирование |
Функции принадлежности, |
0.5 |
0.0000 |
0.1189 |
|
Статическое моделирование |
Функции принадлежности |
1 |
- |
0.1598 |
|
Динамическое моделирование |
Функции принадлежности, |
0.5 |
0.0000 |
0.0575 |
|
Динамическое моделирование |
Функции принадлежности |
1 |
- |
0.0819 |


Концепция гибких нейро-нечетких систем позволяет выбрать тип системы (Мамдани или логический) по результатам обучения. Решения тестовых задач свидетельствуют, что гибкая система в результате обучения становится системой Мамдани (параметр
=0) при решении задач аппроксимации. Таким образом, рекомендуется использовать систему типа Мамдани для задач аппроксимации и идентификации.
Литература:
1. Рутковская, Д. Нейронные сети, генетические алгоритмы и нечеткие системы [Текст] / Д. Рутковский, М. Пилиньский, Л. Рутковский. — М.: «Горячая линия — Телеком», 2004. — 452 с.
2. Лю, Б. Теория и практика неопределенного программирования [Текст] / Б. Лю. — М.: «БИНОМ. Лаборатория знаний», 2013. — 416 с.
3. Rutkowski, L. Flexible neuro-fuzzy systems [Текст] / L. Rutkowski. — Boston: Kluwer Academic Publishers, 2004. — 279 c.
