





Целью статьи являлся анализ принципов построения систем навигации на примере систем для подвижных наземных объектов и определение направлений повышения качества работы данных систем. Сбор необходимых данных проводился путем рассмотрения публикаций связанных с навигационными системами, принципами их построения и алгоритмами обработки информации в них.
Ключевые слова: навигационные системы, подвижные наземные объекты, принципы построения, реконфигурация.
Под термином навигационная система (НС) принято понимать совокупность приборов, алгоритмов и программного обеспечения, позволяющих произвести ориентирование объекта в пространстве. Навигационные системы можно разделить на множество категорий в зависимости от назначения, объема получаемой навигационной информации и используемых методов навигации. В зависимости от области применения навигационные системы разделяют на системы морской, наземной и воздушной навигации.
Область применения навигационной системы определяет объект, на котором будет установлена система, примерный набор необходимых датчиков, условия эксплуатации и требования по надежности и помехозащищенности.
В состав НС обычно входят:
1. Датчики, которые определяют все необходимые параметры движения и координаты местоположения объекта, на котором установлена НС;
2. Вычислительное устройство, предназначенное для обработки информации от датчиков в соответствии с определенным алгоритмом и выдачи информации пользователю;
3. Устройство индикации.
НС всех типов строятся по следующей схеме, представленной на рис.1.
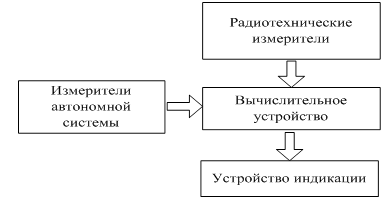
Рис. 1. Обобщенная блок схема систем навигации
Измерители автономной системы (нерадиотехнические измерители) — измерители системы, работающей без сигналов от внешних источников. Основное их назначение — определение координат, параметров движения и пространственного положения продольных осей объекта. Среди главных достоинств данных измерителей следует отметить автономность действия и высокую помехозащищенность. Недостатком является малая для большинства измерителей точность измерения навигационных параметровпо сравнению с радиотехническими измерителями.
Одно из назначений радиотехнических измерителей — коррекция данных полученных от измерителей автономной системы для повышения точности показаний навигационной систем.
Рассмотрим применение данной схемы в навигационной системе для подвижных наземных объектов (ПНО) и рассмотрим направления для повышения качества работы данных систем.
Так для систем данного типа в качестве измерителей автономной системы могут быть использованы — датчик угловых скоростей (ДУС), датчик линейных ускорений (ДЛУ), инерциальная навигационная система (ИНС), цифровой магнитный компас и т. д. В качестве радиотехнических измерителей могут быть использованы: системы сотовой связи, спутниковые системы (ГЛОНАСС/GPS) (СРНС), наземные радиотехнические системы дальней навигации.
Системы навигации для подвижных наземных объектов (ПНО) построенные по схеме на рис.1 подробно рассматриваются в [1] с указанием конкретного состава элементов. В [2] рассматривается обобщенная структура данных навигационных систем, приводятся точностные характеристики, основные производители и дальнейшие перспективы развития НС данного типа.
Основными направлениями для повышения качества работы НС для ПНО являются:
1). Модернизация системы, заключающаяся во введении новых устройств и систем и усовершенствования уже используемых.
Роль нового устройства, которое может быть использовано в составе НС для ПНО, может выполнять система сотовой связи. Она может применяться для повышения точности позиционирования в качестве дополнительной системы с СРНС в густо застроенных городских кварталах, карьерах, подземных парковках. При её использовании в зависимости от применяемой технологии определения местоположения, возможно, получить точность до 50 м. [3].
Усовершенствование уже используемых измерителей заключается в модернизации состава устройства за счет применения новых материалов при конструировании его элементов — новых типов гироскопов и акселерометров при создании ДУС, ДЛУ и ИНС;
Основной сложностью, возникающей при реализации данного направления, является использование устаревших алгоритмов обработки информации, снижающих скорость работы НС и качество получаемой информации вне зависимости от датчиков.
Возможным решением данных проблем является реализация второго направления при повышении качества работы.
2). Внедрение новых алгоритмов обработки информации в НС.
Реализация направления актуальна при комплексировании измерителей.
Сущность комплексирования состоит в использовании информации об одних и тех же или функционально связанных параметрах, полученных от различных измерителей, для повышения точности и надежности определения навигационных параметров.
Возможны следующие варианты комплексных систем (Таблица 1)
Таблица 1
Примеры комплексных навигационных систем для подвижных наземных объектов
|
Состав комплексной системы |
Система |
|
курсовая система магнитного типа (акселерометр, феррозонд), путевая система одометрического типа, СРНС |
«Азимут» |
|
ДУС, ДЛУ, барометрический высотомер, СРНС |
КомпаНав-2Т |
|
ИНС, барометрический высотомер, СРНС |
КомпаНав-3 |
|
ДУС, ДЛУ, СРНС |
КомпаНав-2М |
|
БИНС, одометр, СРНС |
БИНС-Тек |
|
датчики угловой ориентации (геомагнитный и гироскопический); датчик скорости; система дальней навигации («Чайка» и «LORAN-C»), СРНС |
Ориентир |
|
геомагнитный датчик курса, электромеханический одометр, система дальней навигации («Чайка» и «LORAN-C»), СРНС |
КС-100М |
|
датчики угловой ориентации, датчик скорости, СРНС |
«Трона-1». |
|
ДУС, ДЛУ, СРНС |
«Гамма -1»,«Гамма -2» |
|
БИНС, доплеровский датчик скорости, СРНС |
ГАЛС-Д2М-1, ГАЛС-Д2М-2, ГАЛС-Д2М-3, ГАЛС-Д2М-4 |
В настоящее время в навигационных системах применяются оптимальные алгоритмы оценивания, базирующиеся на дифференциальных или разностных уравнениях, полученных на основе методов калмановской фильтрации. Для повышения эффективности необходимо дальнейшее совершенствование данных алгоритмов, например, путем применения для решения задач синтеза методов марковской теории оптимального оценивания. Применение последних позволяет разработать комплексные алгоритмы на уровне первичной обработки информации.
При применении алгоритмов комплексной первичной обработки информации в системах навигации закладывается возможность контроля и диагностики состояния источников первичной информации, таких как спутники СРНС, системы сотовой связи, радиотехнические системы дальней навигации. В настоящее время наиболее перспективными являются комплексные системы не только с возможностью контроля и диагностики элементов системы, но и с возможностью последующей реконфигурации структуры. Реконфигурацию можно производить как при первичной, так и при вторичной обработке информации в навигационных комплексах. При первичной обработке информации контроль производится в НС содержащих бортовую вычислительную систему способную обеспечить внутреннюю реконфигурацию структуры информационной системы при решении различных задач и в случаях отказов или повреждений ее отдельных устройств и системы. Алгоритмы с возможностью реконфигурации при вторичной обработке применяются только к отдельным элементам НС и основаны на использовании нейросетевых методов и нелинейной многоальтернативной фильтрации, предполагающей использование банка фильтров Калмана. Преимуществами систем с возможностью реконфигурации является возможность адаптироваться под изменяющиеся условия работы и окружающей среды и более высокие показатели надежности и работоспособности.
Однако и при внедрении новых алгоритмов обработки информации возможны трудности. Так, например комплексирование систем сотовой связи и СРНС не дает значительного уменьшения погрешностей позиционирования. По причине того, что значения погрешностей, полученные при применении данных технологий в 10–100 раз больше, чем значения, полученные при применении спутниковых радионавигационных систем. Это проиллюстрировано в статье [4] и приведены соответствующие значения погрешностей при проведении моделирования. Так же необходимо учитывать объемы вычислительных затрат, которые необходимы для обработки информации и соотнести их с текущими возможностями вычислительной техники. Для этого необходимо производить расчет объема вычислительных операций алгоритмов перед началом их эксплуатации. Не выполнение данного расчета может привести к невозможности применения данных алгоритмов в НС при текущих условиях и проблемах при выборе микропроцессоров для вычислительных машин.
Литература:
1. Сурков В. О. Системы навигации подвижных наземных объектов и их характеристики/ В. О. Сурков // Молодой ученый. — 2013. — № 7. — С. 76–79.
2. Сурков В. О. Анализ состава существующих систем навигации для подвижных наземных объектов и выбор наиболее перспективного состава, исходя из требований точности и надежности / В. О. Сурков // Современные тенденции технических наук: материалы II междунар. науч. конф. (г. Уфа, май 2013 г.). — Уфа: Лето, 2013. — С. 20–24.
3. Сурков В. О. Точности определения местоположения подвижных наземных объектов в сотовых сетях GSM и UMTS / В. О. Сурков // Молодой ученый. — 2013. — № 6. — С. 147–150.
4. Иванов А. В. Совместная обработка информации спутниковых радионавигационных систем и наземных сетевых систем в навигационных системах подвижных наземных объектов / Иванов А. В., Гостев А. В., Семенов А. А., Соколовская Л. В. / Радиотехника. — Москва, № 4, с.16–19.
