





В статье описана компьютерная программа, моделирующая движение кругового математического маятника. Кратко изложена методика применения этой программы для изучения механических колебаний в курсе физики.
Ключевые слова:компьютерное моделирование, модель, математический маятник, механические колебания, обучение с помощью компьютерных моделей, обучение физике.
Познавая окружающий мир, человек использует математические (упрощенные) модели реальных физических систем [12, с. 272–285]. Считается, что понимание физического явления возникает тогда, когда человек может построить для этого явления адекватную математическую модель. В физике редко встречаются точные и даже приближенные аналитические решения задач. Многие модели в физике и других науках описываются с помощью дифференциальных уравнений. У большинства из них нет аналитического решения, поэтому поведение исследуемого объекта, описываемого уравнением, может быть изучено только с помощью компьютера (численных методов решения дифференциальных уравнений) [7].
Вычислительный эксперимент представляет собой метод изучения физического явления или процесса путем построения их математической модели и следующего за ним численного исследования этой модели [11, с. 20]. Компьютерное моделирование бывает полезно не только в научных исследованиях [1; 2; 9; 13], но и при обучении [3; 4; 5, с. 4–5; 6]. В обоих случаях компьютерные моделирующие программы выполняют функции лаборатории для работы с моделью [7].
Колебания могут иметь различную физическую природу, но в то же время у них есть много общего. Изучение общих закономерностей колебаний является предметом теории колебаний. Изучение колебаний обычно начинается со знакомства обучающихся с колебательным движением, которое доступно зрительному восприятию. Как правило, это движение таких систем, как пружинный и математический маятники. Изучив колебания этих систем, можно затем освоить учебный материал, связанный с другими, не механическими колебаниями (например, электромагнитными).
Разработанная нами методика применения компьютерных моделей при изучении физики предполагает, что обучающиеся используют готовые (созданные преподавателем) компьютерные программы для того, чтобы они могли сосредоточиться не на моделировании, а на изучении физики явлений [8; 10]. Иными словами, в данном случае с помощью компьютерных моделей происходит изучение физических явлений и процессов, а не основ компьютерного моделирования. Обучающиеся, изменяя условия вычислительного эксперимента, наблюдают за моделью и открывают новые для себя знания об объекте исследования. Например, в рассматриваемой в этой статье программе в качестве исследуемого объекта выбран математический маятник, потому что он является достаточно простой для изучения колебательной системой, и его движение можно легко показать на экране компьютера.
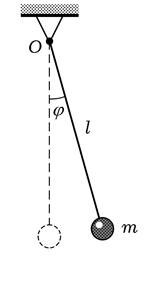
Рис. 1. Круговой математический маятник
Маятник — это тело, совершающее под действием приложенных сил (обычно силы тяжести) колебания около неподвижной точки или вокруг оси. Простейший маятник может состоять из груза и прикрепленного к нему тонкого стержня. Если считать стержень абсолютно твердым и пренебречь размерами груза по сравнению с длиной стержня, а массой стержня по сравнению с массой груза, то такую систему можно рассматривать как материальную точку массой m, находящуюся на неизменном расстоянии l от точки подвеса O (рис. 1). Этот идеализированный маятник и называется круговым математическим, так как траекторией движения материальной точки является дуга окружности, то есть стержень при движении маятника покрывает область пространства, соответствующую части круга — сектору. Маятник имеет одну степень свободы, так как его положение в пространстве можно однозначно задать с помощью единственной угловой координаты φ.
Моделирование с помощью вычислительной техники ни в коей мере не должно заменять натурный эксперимент, оно должно лишь дополнять его, позволяя в нашем случае продемонстрировать обучающимся такие детали колебательного движения, которые недоступны при непосредственном наблюдении. Например, можно изменять масштаб времени, визуально замедляя или ускоряя движение; создавать такие условия, которые трудно или невозможно воспроизвести в реальном эксперименте; строить в режиме реального времени графики, изображающие зависимости характеристик колебательного движения маятника от времени.
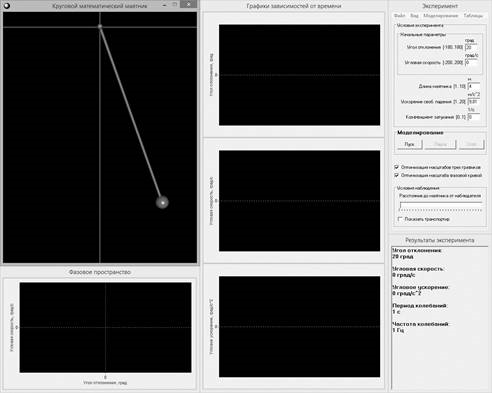
Рис. 2. Окна приложения, реализующего учебную компьютерную модель кругового математического маятника
Созданная нами компьютерная программа предоставляет возможность различной сложности изучения учебного материала. Это обеспечивает ее использование при работе с обучающимися с разной степенью подготовленности к восприятию результатов компьютерного моделирования.
Пять наиболее важных окон приложения, визуализирующего учебную компьютерную модель математического маятника, показаны на рис. 2. В первом окне обучающиеся могут наблюдать движение 3D-модели маятника в «режиме реального времени» (на самом деле, это время также является модельным, но близким к реальному). Программа предоставляет возможность изменять месторасположение наблюдателя (наблюдатель может рассматривать маятник с разных сторон и на разных расстояниях). Для большей наглядности можно расположить рядом с маятником транспортир. Во втором окне (оно расположено под первым) выводится фазовая кривая (зависимость угловой скорости маятника от угла его отклонения от положения равновесия). Третье окно, расположенное левее первых двух, предназначено для вывода трех графиков: зависимости угла отклонения маятника от времени, зависимости угловой скорости маятника от времени и зависимости углового ускорения маятника от времени. Четвертое окно содержит элементы управления моделью. Здесь пользователь программы может изменять параметры маятника и начальные условия эксперимента: угол отклонения маятника от положения равновесия и угловую скорость в начальный момент времени. В пятом окне выводятся текущие (в теории их называют мгновенными, то есть соответствующими данному моменту времени) значения угла отклонения, угловой скорости, углового ускорения, периода и частоты колебаний маятника.
Рассмотрим более подробно четвертое окно приложения. Оно содержит верхнее меню с пунктами «Файл», «Вид», «Моделирование», «Таблицы». Размещенные в нем элементы графического интерфейса позволяют, как уже было сказано выше, изменять начальные условия вычислительного эксперимента (начальный угол отклонения и начальную угловую скорость), а также длину маятника, ускорение свободного падения (напряженность гравитационного поля) и коэффициент сопротивления движению (или коэффициент затухания колебаний). Кроме того, окно содержит кнопки «Пуск», «Пауза» и «Стоп» для соответственно осуществления старта компьютерного модельного эксперимента с заданными начальными условиями, его временной остановки на определенном этапе моделирования с возможностью дальнейшего продолжения этого же эксперимента и полной остановки эксперимента, необходимой для задания новых условий следующего эксперимента.
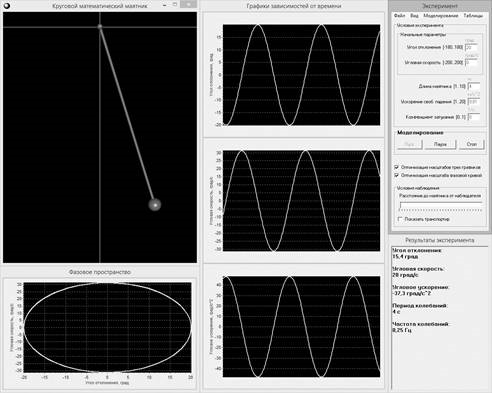
Рис. 3. Моделирование незатухающих (почти гармонических) колебаний маятника
Результаты моделирования программой движения маятника представлены на рис. 3, 4, 5 и 6. В качестве математической модели выбрано однородное дифференциальное уравнение второго порядка, описывающее колебательное движение маятника. Уравнение решается конечно-разностным методом. Это позволяет продемонстрировать обучающимся различные варианты движения и существенно отличает программу от аналогичных, которые предлагаются их создателями для демонстраций при обучении физике колебаний. Как правило, такие программы созданы учителями физики или методистами (либо программистами и методистами), которые почему-то используют в качестве математической модели частный случай решения упомянутого выше дифференциального уравнения, а именно: уравнение гармонических колебаний. В таких программах маятник легко и непринужденно совершает гармонические колебания при любых начальных углах отклонения от положения равновесия, что, конечно же, вводит обучающихся в заблуждение и формирует у них неправильные представления о колебаниях.
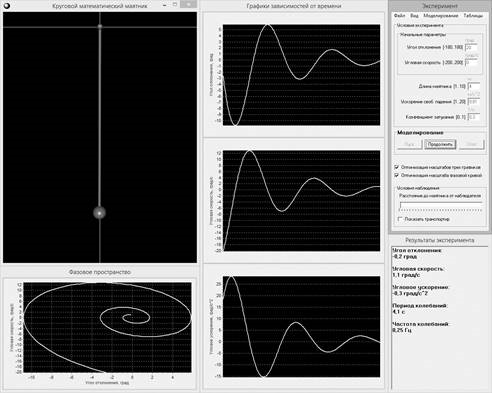
Рис. 4. Моделирование затухающих колебаний маятника
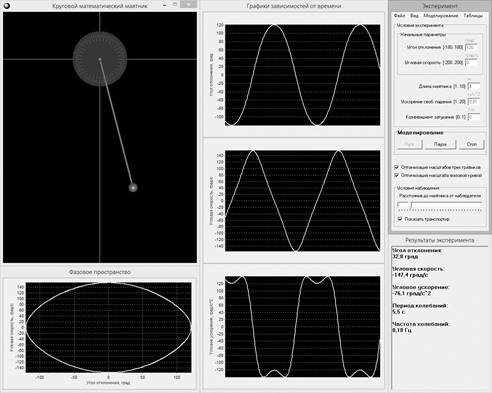
Рис. 5. Моделирование сильно отличающихся от гармонических колебаний маятника
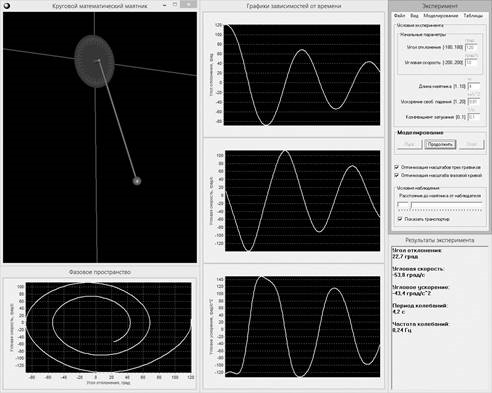
Рис. 6. Еще один пример колебаний маятника
На рис. 4, 5 и 6 приведены примеры движения маятника, демонстрирующие такие колебания маятника, которые существенно отличаются от гармонических. Тем не менее преподаватель при демонстрациях таких результатов должен объяснить обучающимся, что и такие движения носят модельный (идеальный) характер, а движения реальных колебательных систем описать абсолютно точно невозможно, так как слишком много факторов, влияющих на эти колебания, нужно учитывать (можно даже сказать, что количество этих факторов стремится к бесконечности). Любое описание реального движения является приблизительным.
Кроме того, что программа демонстрирует в динамике колебательное движение маятника, выводя синхронно этому движению на экран графики зависимости характеристик движения маятника от времени, она еще предоставляет обучающимся справочную информацию. Эту информацию можно вывести на экран компьютера с помощью элемента верхнего меню «Таблицы» четвертого окна. Предусмотрено два варианта вывода таких таблиц и соответствующих им графиков: первый — с помощью браузера (рис. 7), второй — с помощью редактора электронных таблиц MS Excel (рис. 8, 9 и 10). Первый вариант нужен в том случае, если на пользовательской машине не установлен пакет программ MS Office. Содержимое таблиц и внешний вид графиков могут быть изменены пользователем программы.
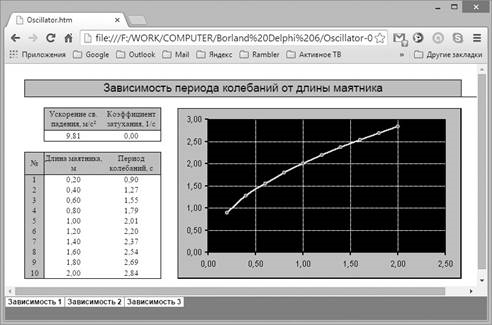
Рис. 7. Демонстрация зависимости периода колебаний маятника от его длины в браузере
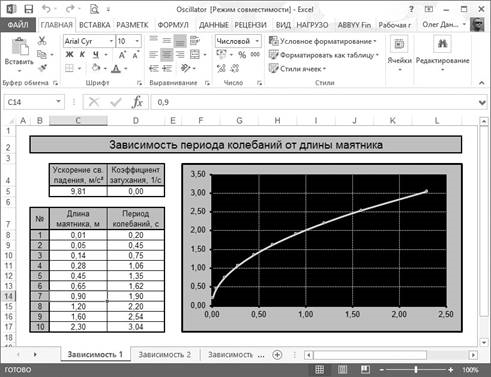
Рис. 8. Демонстрация зависимости периода колебаний маятника от его длины с помощью таблиц MS Excel
С помощью этих таблиц обучающиеся могут получить информацию о том, как зависит период колебаний маятника от различных параметров маятника и свойств окружающей его среды. Например, такими параметрами и свойствами могут быть длина маятника (рис. 7 и 8), ускорение свободного падения, иными словами — напряженность гравитационного поля планеты (рис. 9), трение в оси маятника или вязкость окружающей среды, которые приводят к затуханию колебаний (рис. 10).
Следует отметить, что рассмотренная в этой статье программа может быть использована как при демонстрациях преподавателем, так и при выполнении виртуальных лабораторных работ обучающимися, а также при проведении ими самостоятельных учебных исследований. Она является современным средством обучения физике и соответствует педагогическим и дидактическим требованиям, предъявляемым к программным средствам учебного назначения.
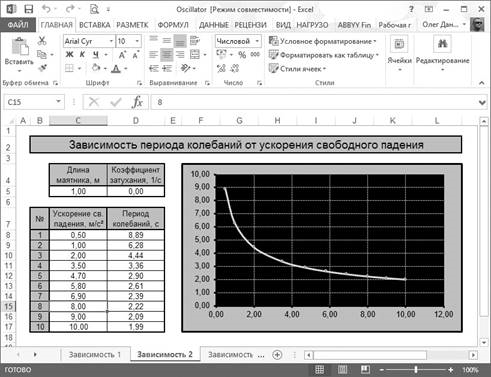
Рис. 9. Демонстрация зависимости периода колебаний маятника от ускорения свободного падения на планете (напряженности гравитационного поля) с помощью таблиц MS Excel
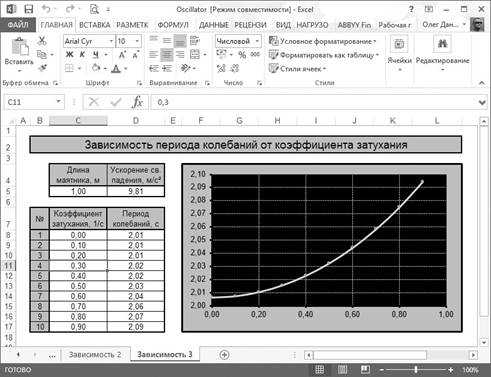
Рис. 10. Демонстрация зависимости периода колебаний маятника от коэффициента затухания колебаний с помощью таблиц MS Excel
Литература:
1. Герасимов В. А. Ветвление равновесных форм капель и пузырей в электрическом поле / В. А. Герасимов, О. Е. Данилов, В. А. Саранин // Гидродинамика: Сборник науч. трудов. Вып. 11. — Пермь: Перм. ун-т, 1998. — С. 114–123.
2. Данилов О. Е. Влияние газа на устойчивость равновесия кавитационного электрически заряженного пузыря / О. Е. Данилов, В. А. Саранин; Глазовский гос. пед. ин-т. — Глазов, 1994. — 13 с. — Деп. в ВИНИТИ 10.11.94; № 2534.
3. Данилов О. Е. Изучение интерференции с помощью компьютерного моделирования / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2013. — № 9. — С. 50–58.
4. Данилов О. Е. Компьютерное моделирование движения молекул газа / О. Е. Данилов // Проблемы учебного физического эксперимента: Сборник научных и методических работ. Выпуск 2. — Глазов: ГГПИ, 1996. — С. 78–80.
5. Данилов О. Е. Компьютерное моделирование колебательного движения. Численные методы решения задач: учебно-методическое пособие / О. Е. Данилов, А. Ю. Трефилова. — Глазов: Глазов. гос. пед. ин-т, 2012. — 36 с.
6. Данилов О. Е. Компьютерное моделирование полей точечных зарядов / О. Е. Данилов, А. В. Ушаков // Проблемы учебного физического эксперимента: Сборник научных и методических работ. Выпуск 4. — Глазов: ГГПИ, 1998. — С. 65–69.
7. Данилов О. Е. Обучение компьютерному моделированию на примере создания компьютерной модели кругового математического маятника / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2013. — № 10. — С. 80–87.
8. Данилов О. Е. Применение имитационного моделирования механических взаимодействий при обучении физике / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2014. — № 5. — С. 97–103.
9. Данилов О. Е. Устойчивость равновесия электрически заряженных пузырей в условиях невесомости / О. Е. Данилов, В. А. Саранин // 11-я Международная школа по механике сплошных сред. Тезисы докладов. Кн. 1. — Екатеринбург: УрО РАН, 1997. — С. 111.
10. Данилов О. Е. Учебная компьютерная модель физического маятника / О. Е. Данилов // Молодой ученый. — 2014. — № 15. — С. 49–52.
11. Зарубин В. С. Моделирование: учеб. пособие для студ. учреждений высш. проф. образования / В. С. Зарубин. — М.: Издательский центр «Академия», 2013. — 336 с.
12. Кондратьев А. С. Современные технологии обучения физике: Учебное пособие / А. С. Кондратьев, Н. А. Прияткин. — СПб.: Изд-во С.-Петерб. ун-та, 2006. — 342 с.
13. Саранин В. А. К задаче об электрической зарядке двух шаров при их соприкосновении / В. А. Саранин, О. Е. Данилов // Физическое образование в вузах. — Т. 14. — 2008. — № 4. — С. 20–25.
