





Для определенности изложения все выкладки сделаны для плоского центрального кривошипно-ползунного механизма.
Движение точки В ползуна будем рассматривать в неподвижной системе отсчета XB2Y. Определим ускорение точки В ползуна в крайних ее положениях B1 и В2, полагая, что кривошип вращается равномерно со скоростью  .
.
Из рис. 1 можно получить зависимость между скоростями точек B и A:
где: Ob — отрезок, отсекаемый на прямой OY1 являющится продолжением оси симметрии шатуна.
Ускорение точки B можно определить выражением:


то
 (1)
(1)
где:  k1 — масштабный коэффициент для y=Ob
k1 — масштабный коэффициент для y=Ob
Из формулы (1) видно, что

поэтому:
для правого крайнего положения точки В имеем:

где:  = r / l — геометрический параметр механизма.
= r / l — геометрический параметр механизма.
Аналогично:
для левого крайнего положения точки В имеем:

В соответствии с этим по формуле (1) найдем ускорения точки В ползуна в правом и левом крайних положениях:
Как известно, график функции имеет вид:

где: S = k1x, — можно с достаточной точностью принять за параболу, которая проходит через точки  и
и  , а касательные к параболе в этих точках пересекаются в точке
, а касательные к параболе в этих точках пересекаются в точке  , где:
, где:  представляет абсциссу точки пересечения прямой d1e1 с осью направляющей (рис. 2).
представляет абсциссу точки пересечения прямой d1e1 с осью направляющей (рис. 2).
Уравновешивание вращающихся масс.
Центр масс подвижных звеньев механизма определим вектором
где:  — вектор главной точки i-го звена.
— вектор главной точки i-го звена.
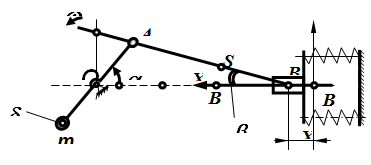
Рис. 1. Схема механизма иглы с упругой связью
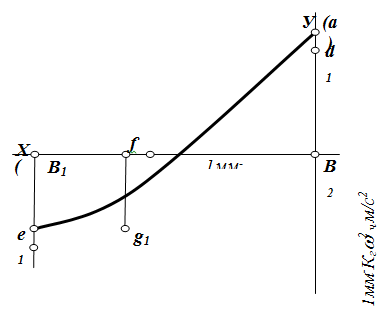
Рис. 2. График измения зависимости перемещения иглы от ускорения
Если векторы  и
и  главных точек кривошипа и шатуна удовлетворяют пропорции
главных точек кривошипа и шатуна удовлетворяют пропорции
 (2)
(2)
то справедливо равенство

представляющее условие уравновешенности вращающихся масс, к которым относятся масса т1 кривошипа (рис. 2) и часть массы т2 шатуна, приведенная статически к точке А кривошипа и равная
Таким образом, для реализации условия (2), кривошипу необходимо придать такую форму, чтобы его дисбаланс относительно оси вращения был:
Если последнее условие выполняется, то центр масс подвижных звеньев механизма будет двигаться вдоль оси направляющей с ускорением  . Поэтому по оси направляющей будет действовать неуравновешенная сила
. Поэтому по оси направляющей будет действовать неуравновешенная сила
 (3)
(3)
где:
представляет поступательно движущуюся массу, состоящую из массы т3 ползуна и шатунной массы
Разгрузка кинематических пар от действия силы  (S). Сила (S)будет вызывать динамические давления в кинематических парах механизма, которые могут создавать не только отмеченные выше отрицательные явления, но в некоторых случаях служить основным препятствием для повышения производительности машины.
(S). Сила (S)будет вызывать динамические давления в кинематических парах механизма, которые могут создавать не только отмеченные выше отрицательные явления, но в некоторых случаях служить основным препятствием для повышения производительности машины.
Чтобы полностью разгрузить вращательные пары от действия силы  , необходимо установить между ползуном и стойкой упругую связь с такой характеристикой Q(S), чтобы удовлетворялось условие:
, необходимо установить между ползуном и стойкой упругую связь с такой характеристикой Q(S), чтобы удовлетворялось условие:
Q(S) = - (4)
(4)
при любой частоте вращения кривошипа.
Однако сила (2.3) является существенно нелинейной и зависит не только от абсциссы точки В ползуна, но и от частоты вращения кривошипа. По этой причине, реализация равенства (2.4) встречает в общем случае значительные конструктивные трудности. Решим локальную задачу о частичной разгрузке кинематических пар механизма упругой связью с линейной характеристикой при некоторой номинальной частоте вращения кривошипа.
Литература:
1. Лебедев В. С. Технологические процессы машин и аппаратов в производствах бытового обслуживания. -М.: Легпромбытиздат, 1991. -331 с.
2. Макаров А. И., Крылов В. В. и др. Расчет и конструирование машин прядильного производства. -М.: Машиностроение, 1981. — 464 с.
3. Маракушев Е. А. и др., Машины швейного производства. Конструкция, расчет и основы проектирования. –Киев, Техника, 1967. — 324 с.
