





В статье решается задача разработки математических моделей электротехнических комплексов буровых установок (ЭТК БУ), учитывающих взаимное влияние системы электроснабжения и техническое состояние электроприводов главных исполнительных механизмов. Поставленная задача выполнена с помощью метода структурного моделирования в программной среде Matlab(SIMULINK) и специализированной библиотеки SimPowerSystems.
Ключевые слова:бурение, электротехнические комплексы буровых установок, математические модели, электропривод.
Совершенствование техники и технологических процессов бурения, повышение их производительности, снижение энергозатарат, ресурсоемкости и увеличение энергоэффективности при проводке скважин — серьезная народнохозяйственная задача. Изыскание наиболее совершенных способов сооружения скважин в различных условиях без использования современных ЭВМ и компьютерных средств моделирования физических процессов не возможно.
Большинство отечественных установок разведочного бурения (УКБ-4,ЗИФ-1200 и др.) в качестве главных силовых приводов используют нерегулируемые электроприводы переменного тока, основным узлом которых является трехфазный асинхронный электродвигатель с короткозамкнутым ротором (ТАД) [1,2]. Дефекты и неисправности (обрывы или раковины стержней беличьей клетки ротора, наличие короткозамкнутых витков в обмотках статора, статический и динамический эксцентриситет и т. п.), возникающие при эксплуатации ТАД или обусловленные нарушением технологии производства, оказывают сильное влияние не только на работу самого электродвигателя и приводного механизма [1,5,6,7], но и на работу электрической сети. Особенно сильно данное влияние проявляется при работе неисправного ТАД в системах соизмеримой мощности, к которым относятся системы электроснабжения геологоразведочных работ (ГРР).
Для изучения взаимного влияния неисправных двигателей на систему электроснабжения ГРР методом структурного моделирования в программной среде Matlab (Simulink) с использованием специализированной библиотеки SimPowerSystems [3] разработаны следующие модели:
1. Модель главных электроприводов буровой установки УКБ-4 при электроснабжении от трансформаторной подстанции.
2. Модель главных электроприводов буровой установки УКБ-4 при электроснабжении от синхронного генератора соизмеримой мощности.
В качестве объекта прототипа для моделирования выбран ЭТК буровой установки УКБ-4. Перечень и характеристики приводных электродвигателей приведены в Таблице 1.
Таблица 1
Паспортные данные асинхронных приводных электродвигателей в составе ЭТК УКБ-4
|
Тип |
Pн, кВт |
Номинальный режим |
mmax |
mп |
kI |
J, |
||
|
nн, об/мин |
η, % |
cosφ |
||||||
|
4AM100S4 |
3,0 |
1435 |
82 |
0,83 |
2,4 |
2,0 |
6,0 |
|
|
4AM132М4 |
11,0 |
1460 |
84,5 |
0,87 |
3,0 |
2,2 |
7,5 |
|
|
4A180S4 |
22,0 |
1470 |
90 |
0,9 |
2,3 |
1,4 |
6,5 |
|




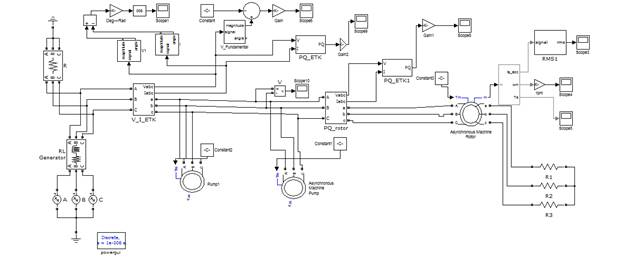
Рис.1. Математическая модель модели ЭТК УКБ-4 при электроснабжении от трансформаторной подстанции в пакете Matlab
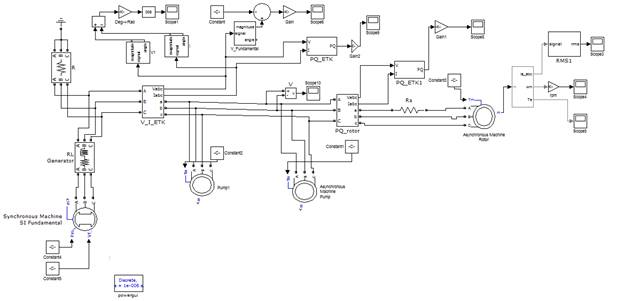
Рис.2. Математическая модель ЭТК УКБ-4 при электроснабжении от синхронного генератора соизмеримой мощности в пакете Matlab
На выше представленных рисунках изображены разработанные математические модели. В основе их лежат блоки из библиотеки SimPowerSystems источников электрической энергии, активных и реактивных сопротивлений, электрических машин, а также блоки измерения и регистрации механических и электрических величин [3]. Работа электрических машин описана уравнениями Парка-Горева.
1) Электрическая часть
 (1)
(1)
где  — напряжение статора по оси q, В;
— напряжение статора по оси q, В;  — сопротивление статора, Ом;
— сопротивление статора, Ом;  — ток статора по оси q, А;
— ток статора по оси q, А;  — потокосцепление по оси q, Вб;
— потокосцепление по оси q, Вб;  — электрическая частота вращения магнитного поля, рад/с;
— электрическая частота вращения магнитного поля, рад/с;  — потокосцепление по оси d, Вб.
— потокосцепление по оси d, Вб.
 (2)
(2)
где  — напряжение статора по оси d, В;
— напряжение статора по оси d, В;  — ток статора по оси d, А.
— ток статора по оси d, А.
 (3)
(3)
где  — напряжение ротора по оси q, В;
— напряжение ротора по оси q, В;  — сопротивление ротора, Ом;
— сопротивление ротора, Ом;  — ток ротора по оси q, А;
— ток ротора по оси q, А;  — потокосцепление по оси q, Вб;
— потокосцепление по оси q, Вб;  — электрическая частота вращения ротора, рад/с;
— электрическая частота вращения ротора, рад/с;  — потокосцепление по оси d, Вб.
— потокосцепление по оси d, Вб.
 (4)
(4)
где  — напряжение ротора по оси d, В;
— напряжение ротора по оси d, В;  — ток ротора по оси d, А; — потокосцепление по оси q, Вб.
— ток ротора по оси d, А; — потокосцепление по оси q, Вб.
 (5)
(5)
где  — электромагнитный крутящий момент, Нм;
— электромагнитный крутящий момент, Нм;  — число пар полюсов.
— число пар полюсов.
 (6)
(6)
где  – суммарная индуктивность статора, Гн;
– суммарная индуктивность статора, Гн;  - индуктивность ветви намагничивания, Гн.
- индуктивность ветви намагничивания, Гн.
 (7)
(7)
 (8)
(8)
где  – суммарная индуктивность ротора, Гн.
– суммарная индуктивность ротора, Гн.
 (9)
(9)
 (10)
(10)
где  – индуктивность рассеяния статора, Гн.
– индуктивность рассеяния статора, Гн.
 (11)
(11)
где  – индуктивность рассеяния ротора, Гн.
– индуктивность рассеяния ротора, Гн.
2) Механическая часть
 (12)
(12)
где  – скорость вращения ротора, рад/с;
– скорость вращения ротора, рад/с; — приведенный коэффициент инерции ротора и рабочего механизма;
— приведенный коэффициент инерции ротора и рабочего механизма; — приведенный коэффициент вязкого трения ротора и рабочего механизма.
— приведенный коэффициент вязкого трения ротора и рабочего механизма.
 (13)
(13)
где  – угловое положение ротора, рад.
– угловое положение ротора, рад.
Расчет нагрузки на валу электродвигателей выполнен с помощью методики Всесоюзного научно-исследовательского института экономики минерального сырья и геологоразведочных работ (ВИЭМС) утвержденной министерством геологии СССР в 1989г. Ниже, приведены основные уравнения, используемые в данной работе.
Мощность на валу двигателя вращателя Рд.вр (кВт) определяется по формуле:
Рд.вр = Рхх + (Ррз + Pбт)(1 — к)-1 (14)
где Рхх — потери мощности в станке при холостом ходе вращателя, кВт; Ррз — мощность на разрушение забоя, кВт; Pбт — мощность на вращение бурильных труб, кВт; к — коэффициент потери мощности станка при передаче нагрузки вращателю.
Мощность на валу двигателя маслонасоса Рмн:
Рмн = 4×10–4р (15)
где р — давление в гидросистеме станка, кПа.
Мощность на валу двигателя бурового насоса Рбн.пр (кВт) равна:
Рбн.пр = Q×P2/hн (16)
где Q — общая подача насоса, м3/с; Р2 — давление, развиваемое насосом при подаче в скважину промывочной жидкости, равной Q2 (в некоторых случаях Q2 = Q), кПа; hн — общий кпд насоса при частоте вращения коленчатого вала, обеспечивающий подачу Q, и давление Р2.
Изменяя параметры статорной или роторной цепи каждого из электродвигателей, возможно имитировать их различное техническое состояние. Варьируя механическую нагрузку на валу электродвигателя вращателя, можно моделировать различные режимы бурения. Так же, имеется возможность регулировать параметры источника электроэнергии, тем самым изменяя качество подводимой электроэнергии к буровой установке.
Полученные количественные и качественные зависимости потребляемых мощностей с помощью моделей позволяют более точно определять удельные затраты электроэнергии на процесс бурения скважин, а также удельный расход дизельного топлива электростанций.
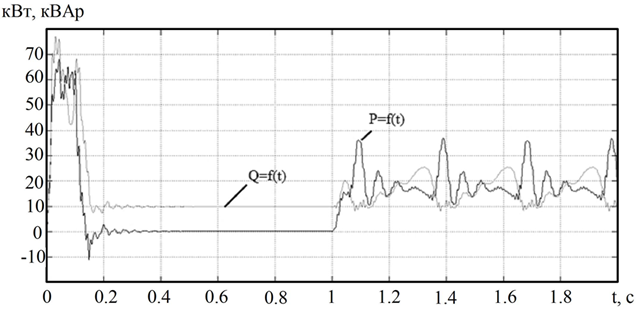
Рис.3. Временные зависимости потребляемой активной и реактивной мощности при неисправном электроприводе вращателя
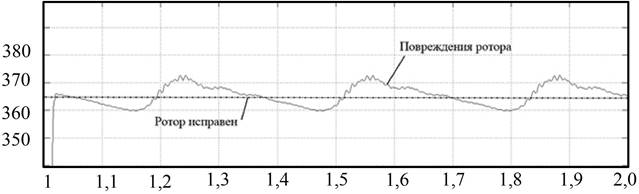
Рис.4. Временные зависимости действующего значения напряжения (в установившемся режиме)
На рисунках 3 и 4 представлены временные зависимости потребляемой активной и реактивной мощности при работе электропривода вращателя с обрывами стержней «беличьей клетки» и временные зависимости действующего значения напряжения (в установившемся режиме) соответственно. По этим зависимостям хорошо видно значительное негативное влияние неисправностей электропривода вращателя бурового станка, как наиболее энергоемкого потребителя, на работу других электроприводов установки. Повреждения ротора двигателя приводят к низкочастотной модуляции питающего напряжения всех потребителей, что в свою очередь вызывает увеличение общей потребляемой активной мощности (до 35 %), снижение общего коэффициента мощности (до 13 %). При подобной эксплуатации оборудования невозможно добиться оптимальных величин скорости вращения породоразрушающего инструмента и подаваемой промывочной жидкости, тем самым увеличивая затраты времени и топливно-энергетических ресурсов на проведение буровых работ и ухудшая качество выхода керна.
Стоить отметить тот факт, что модели являются достаточно гибкими. Изменение параметров электродвигателей без изменения структуры самой модели позволяет получать подобные количественные и качественные оценки для любых буровых установок разведочного бурения, с нерегулируемыми электроприводами переменного тока.
В заключении можно сказать, что результаты экспериментов с данными математическими моделями выявили характерные признаки и зависимости при эксплуатации неисправных электропотребителей БУ, позволили оценить влияние неисправных электропотребителей на зависимость затрат электроэнергии при проведении буровых работ, что в совокупности предоставит рекомендации по энергоэффективной и энергосберегающей эксплуатации электротехнического оборудования БУ.
Литература:
1. Григорьев М. И. «Методы энергосберегающей эксплуатации асинхронного электропривода геологоразведочных буровых установок». Московская государственная геологоразведочная академия. — М.: 2000. — 132с.
2. Соловьев Н. В., Кривошеев В. В., Башкатов Д. Н. «Бурение разведочных скважин. Учебник для вузов». — М.: Высшая школа, 2007. — 907 с.
3. Черных И. В. «Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink». — М.:ДМК пресс; СПБ.:Питер, 2008.-288с. ил.
4. W. T. Thompson, M.Fenger «Current signature analysis to detect induction motor faults». IEEE Industry Application Magazine. July/August 2001.
5. W. T. Thompson, M.Fenger «Industrial application of current signature analysis to diagnose faults in 3-phase squirrel cage induction motors» Pulp and Paper Industry Technical Conference, 2000. Conference Record of 2000, pp 205–211.
6. J. M. Cardoso, S.M. A. Cruz and D. S. B. Fonseca, “Inter-Turn Stator Winding Fault Diagnosis in Three Phase Induction Motors by Park’s Vector Approach”, IEEE Transactions on Energy Conversion, Vol. 14, No. 3, September 1999, pp. 595–598.
7. W. T. Thomson, D. Rankin and D. G. Dorrell, “Online Current Monitoring to Diagnose Air Gap Eccentiricity in Large Three-Phae Indiuction Motors-Industrial Case Histories Verify the Predictions” IEEE Transactions on Energy Conversion, Vol. 14, No. 4, Dec. 1999, pp. 1372–1378.
