





В рамках проекта «Луна-Глоб» одной из задач, стоящих перед ФГУП «НПО им. С. А. Лавочкина», является разработка стенда бросковых испытаний, имитирующего приземление спускаемого космического аппарата на поверхность Луны.
В свою очередь, дной из задач, которую должна решать информационно-измерительная аппаратура, обслуживаюшая испытательный стенд, является регистрация и измерение скорости движения макета спускаемого аппарата вдоль наклонной балки, внешний вид которой представлен на рис. 1, слева.
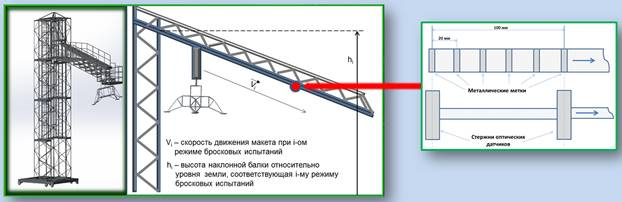
Рис. 1. Наклонная балка и отметочная оснастка вдоль наклонной балки
В процессе бросковых испытаний, макет должен разгоняться до скорости  (i− номер режима бросковых испытаний), по достижении которой будет осуществляться подрыв пирозамка в устройстве крепления макета к тележке и его отделение с последующим приземлением на площадку для сброса.
(i− номер режима бросковых испытаний), по достижении которой будет осуществляться подрыв пирозамка в устройстве крепления макета к тележке и его отделение с последующим приземлением на площадку для сброса.
Скорость движения макета можно определить из данных таблицы 1, где указаны значения вертикальной  и горизонтальной
и горизонтальной  составляющих вектора скорости движения макета для каждого из режимов испытаний, путем подстановки их в выражение
составляющих вектора скорости движения макета для каждого из режимов испытаний, путем подстановки их в выражение
 ,
,
где  и
и  соответственно горизонтальная и вертикальная составляющие скорости движения макета вдоль наклонной балки в i− ом режиме бросковых испытаний.
соответственно горизонтальная и вертикальная составляющие скорости движения макета вдоль наклонной балки в i− ом режиме бросковых испытаний.
Таблица 1
Режимы бросковых испытаний
|
№ режима испытаний |
Вертикальная составляющая скорости движения макета |
Горизонтальная составляющая скорости движения макета |
Высота точки сброса |
|
1 |
0,32 |
1,23 |
3,73 |
|
2 |
0,32 |
1,23 |
1,9 |
|
3 |
0,65 |
2,45 |
3,72 |
|
4 |
0,65 |
2,45 |
0,28 |
|
5 |
0 |
0 |
1,9 |
|
6 |
0 |
0 |
3,74 |
 , м
, м
Для регистрации скорости движения макета используются два типа отметочных оснасток, расположенные вдоль наклонной балки в соответствии со схемой, показанной на рис. 1, справа. Металлические метки с шагом  мм предназначены для регистрации скорости движения макета индукционным датчиком, который в процессе движения макета проходит в близи каждой из меток, выдавая сигнал логической «1», при наличии метки, и сигнал логического «0», при ее отсутствии.
мм предназначены для регистрации скорости движения макета индукционным датчиком, который в процессе движения макета проходит в близи каждой из меток, выдавая сигнал логической «1», при наличии метки, и сигнал логического «0», при ее отсутствии.
Помимо металлических меток вдоль балки расположены также стержни с шагом  мм для оптических датчиков, предназначенные для регистрации скорости движения макета спускаемого аппарата вдоль наклонной балки оптическими щелевыми датчиками, которые по аналогии с индукционным датчиком также выдают сигналы логических «1» или «0», в зависимости от засветки их специальными стержнями.
мм для оптических датчиков, предназначенные для регистрации скорости движения макета спускаемого аппарата вдоль наклонной балки оптическими щелевыми датчиками, которые по аналогии с индукционным датчиком также выдают сигналы логических «1» или «0», в зависимости от засветки их специальными стержнями.
В процессе разработки системы измерения скорости движения макета вдоль наклонной балки важное место было уделено созданию графического интерфейса пользователя программы, который позволил бы обеспечить одновременно и максимальную наглядность в визуализации данных, получаемых с информационно-измерительной системы, и относительную простоту в обслуживании процессов сбора и хранения результатов испытаний.
На рис. 2 представлен внешний вид интерфейса программы измерения скорости движения макета спускаемого аппарата вдоль наклонной балки, которая в процессе разработки программного обеспечения системы управления бросковым стендом получила рабочее название «ПОСК».
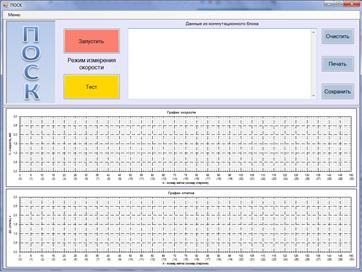
Рис. 2. Интерфейс пользователя программы «POSK»
Интерфейс программы «ПОСК» имеет в своем составе всего пять управляющих кнопок, две из которых «Запустить» и «Тест» предназначены непосредственно для построения графиков скорости движения макета вдоль наклонной балки, а три кнопки «Очистить», «Печать» и «Сохранить» отводятся уже для окончательного принятия решения: сохранении полученных результатов, либо их полное удаление.
Из данного рисунка также видно, что на панели интерфейса имеются два окна для вывода графиков. Первое окно выводит график изменения скорости движения макета, а второе − график временных отчетов, получаемых от системы измерения скорости движения макета. Именно на основе последних и строится график изменения скорости движения макета спускаемого аппарата.
После нажатия кнопки «Запустить» происходит получение данных о временных интервалах  , где
, где  − порядковый номер метки, регистрируемой индукционным (либо оптическим) датчиком. Эти данные, в свою очередь, передаются от микроконтроллера системы измерения скорости на ПК с установленной на нем программой «ПОСК» по интерфейсу RS-485. В программе «ПОСК» осуществляется расчет скорости движения макета вдоль наклонной балки с присвоением мгновенных значений скоростей металлическим меткам и отметочным стержням.
− порядковый номер метки, регистрируемой индукционным (либо оптическим) датчиком. Эти данные, в свою очередь, передаются от микроконтроллера системы измерения скорости на ПК с установленной на нем программой «ПОСК» по интерфейсу RS-485. В программе «ПОСК» осуществляется расчет скорости движения макета вдоль наклонной балки с присвоением мгновенных значений скоростей металлическим меткам и отметочным стержням.
Расчет скорости движения каретки и присвоение мгновенных значений скоростей металлическим меткам осуществляется по простой формуле
 ,
,
где  и
и  − значения времени фиксации наличия металлических меток в данный и предыдущий моменты времени индукционным датчиком. После чего, все результаты выводятся на графический интерфейс программы «ПОСК», как это показано на рис. 3.
− значения времени фиксации наличия металлических меток в данный и предыдущий моменты времени индукционным датчиком. После чего, все результаты выводятся на графический интерфейс программы «ПОСК», как это показано на рис. 3.
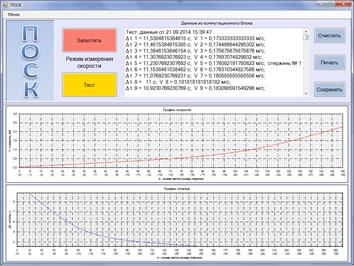
Рис. 3. Вывод графиков измерения скорости и временных отчетов
Таким образом, разработанный интерфейс позволяет выводить графики изменения скорости движения и временных отчетов при регистрации скорости движения макета спускаемого аппарата как индукционными датчиками, так и оптическими щелевыми.
Выводы:
1) разработанный интерфейс программы «ПОСК» довольно прост в обращении с ним оператора, обслуживающего систему измерения скорости движения макета спускаемого аппарата;
2) важным достоинством данного интерфейса является возможность анализа не только графика изменения скоростей, регистрируемых индукционным и оптическими датчиками, но и анализа временных отчетов, на основе которых данные графики составляются.
Литература:
1. Аверченков О. Е. Схемотехника: аппаратура и программы. — М.: Изд. ДМК, 2012.-588с.
2. Макаров В. П., Маркачев Н. А., Захаров Ю. В., Гришин С. А., Голиков Г. В. Создание и совершенствование стенда бросковых испытаний автоматических космических аппаратов/Вестник НПО им. С. А. Лавочкина, № 1, 2013,с.56–62.
3. Ревич Ю. В. Практическое программирование микроконтроллеров AtmelAVR на языке ассемблера. — СПб.: БХВ-Петербург, 2012.-352 с.
4. Савкин Л. В., Щербаков А. С., Ильиных И. А., Голиков Г. В., Дмитриев В. Г., Макаров А. С. Разработка электронной аппаратуры системы автоматического управления стендом для отработки мягкой посадки на динамически подобной модели по теме «ЛУНА-ГЛОБ». Электронный научно-технический журнал «Инженерный вестник»,#08, август 2014.
