





При конструировании механических узлов РЭС перед конструктором встает задача позиционирования различных узлов: перемещение считывающих головок, поворот антенн на определенный угол, перемещение узла экструдера 3D принтера в пространстве и так далее. Для выполнения этой задачи идеально подходят шаговые двигатели.
Шаговые двигатели имеют ряд преимуществ перед обычными двигателями постоянного тока:
- Угол поворота ротора определяется числом импульсов, которые поданы на двигатель.
- Прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3–5 % от величины шага. Эта ошибка не накапливается от шага к шагу.
- Возможность быстрого старта/остановки/реверсирования.
- Высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников.
- Возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора.
- Может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Итак, перед нами стоит задача организовать одноканальное управление шаговым двигателем.
Выбор двигателя
Шаговые двигатели в зависимости от конфигурации обмоток подразделяются на биполярные, униполярные и четырехобмоточные. Биполярный двигатель имеет одну обмотку в каждой фазе, изменение магнитного поля в которых происходит за счет изменения направления тока. Это делает управляющую схему достаточно сложной. В униполярных двигателях так же по одной обмотке в каждой фазе, но от середины обмотки сделан отвод, что позволяет управлять двигателем при помощи последовательной коммутации полуобмоток. Четырехобмоточные шаговые двигатели имеют по две обмотки в каждой фазе и управляются последовательной коммутацией обмоток. Схема устройства шаговых двигателей показана на рисунке 1.
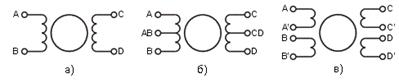
Рис. 1. Устройство шаговых двигателей: биполярный (А), униполярный (Б) и четырехобмоточные (В) шаговые двигатели
Выберем для решения нашей задачи униполярный шаговый двигатель, ввиду простоты его управления.
Управление шаговым двигателем
Задача управления униполярным шаговым двигателем состоит в формировании последовательности импульсов, коммутирующих обмотки через транзисторные ключи. Импульсы формируются при помощи унифицированного модуля Arduino в соответствии с данными, подаваемыми на него с ЭВМ или других блоков управления системой, в которой установлен шаговый двигатель. Схема включения шагового двигателя указана на рисунке 2.
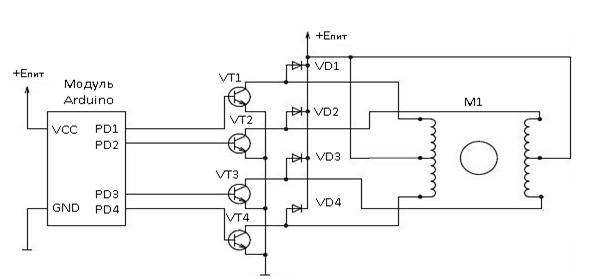
Рис. 2. Схема включения шагового двигателя
В данной схеме диоды VD1-VD4 используются для ускорения времени спада тока обмоток шагового двигателя. Питание подается на отводы обмоток, так как ток, получаемый на выходе модуля Arduino, сравнительно мал.
Шаговый двигатель может работать в шаговом или полушаговом режиме. В шаговом режиме за одну коммутацию двигатель поворачивается на один шаг, в полушаговом — на половину шага соответственно. Последовательности импульсов, формируемых модулем Arduino, указаны в таблице.
Таблица 1
Последовательность управляющих импульсов для шагового (а) и полушагового (б) режимов
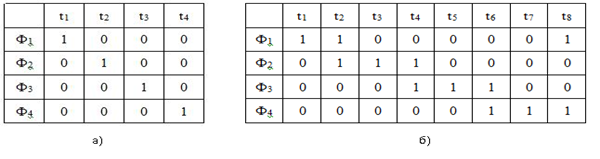
Для поворота двигателя в противоположную сторону управляющие импульсы подаются в обратной последовательности. Скорость поворота двигателя изменяется за счет изменения частоты управляющих импульсов.
Заключение
Несмотря на все свои положительные стороны, шаговые двигатели имеют ряд недостатков:
- шаговым двигателем присуще явление резонанса;
- возможна потеря контроля положения ввиду работы без обратной связи;
- потребление энергии не уменьшается даже без нагрузки;
- затруднена работа на высоких скоростях;
- невысокая удельная мощность;
- относительно сложная схема управления.
Приведенные выше недостатки следует учитывать при применении шаговых двигателей в различных системах управления.
Литература:
1. Андреев П. Г. Анализ программных пакетов моделирования влияния электромагнитных воздействий на изделия радиоэлектронных средств / П. Г. Андреев, С. А. Бростилов, Т. Ю. Бростилова, Н. В. Горячев, Г. П. Разживина, В. А. Трусов // Информационно-вычислительные технологии и математическое моделирование в решении задач строительства, техники, управления и образования: сб. статей. Междунар. научн.чтения– Пенза: ПГУАС, 2014. — C 126–130.
2. Бростилов С. А. Метрологический анализ измерительной подсистемы информационно-измерительной системы для исследования средств воздушного охлаждения / С.А Бростилов, Н. В. Горячев, Т. Ю. Бростилова // Труды международного симпозиума Надежность и качество. 2014. Т. 2. С. 127–129.
3. Гусев А. М. Структурно-разностный анализ элемента, включающего вершинную, негативную, позитивную и позитивно-контурную пары направлений / А. М. Гусев, Э. В. Лапшин, Г. Г. Беликов, И. Ю. Наумова, Н. В. Горячев, А. К. Гришко // Международный студенческий научный вестник. 2014. № 3. С. 7.
4. Шуваев П. В. Формирование структуры сложных многослойных печатных плат / П. В. Шуваев, В. А. Трусов, В. Я. Баннов, И. И. Кочегаров, В. Ф. Селиванов, Н. В. Горячев // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 364–373.
5. Горячев Н. В. Подсистема расчета средств охлаждения радиоэлементов в интегрированной среде проектирования электроники / Н. В. Горячев, И. Д. Граб, А. А. Рыжов // Известия высших учебных заведений. Поволжский регион. Технические науки. 2010. № 4. С. 25–30.
6. Сивагина Ю. А. Разработка ретранслятора радиосигналов и его компьютерной модели / Ю. А. Сивагина, Н. В. Горячев, Н. К. Юрков, И. Д. Граб, В. Я. Баннов // Современные информационные технологии. 2013. № 17. С. 207–213.
7. Горячев Н. В. Концептуальная схема разработки систем охлаждения радиоэлементов в интегрированной среде проектирования электроники / Н. В. Горячев, Н. К. Юрков // Проектирование и технология электронных средств. 2009. № 2. С. 66–70.
8. Трифоненко И. М. Обзор систем сквозного проектирования печатных плат радиоэлектронных средств / И. М. Трифоненко, Н. В. Горячев, И. И. Кочегаров, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2012. Т. 1. С. 396–399.
9. Горячев Н. В. Тепловая модель учебной системы охлаждения / Н. В. Горячев, Д. Л. Петрянин // Прикаспийский журнал: управление и высокие технологии. 2014. № 2. С. 197–209.
10. Grab I. D., Sivagina U. A., Goryachev N. V., Yurkov N. K. Research methods of cooling systems. Innovative Information Technologies: Materials of the International scientific — рractical conference. Part 2. –M.: HSE, 2014, 443–446 pp.
11. Горячев Н. В. Уточнение тепловой модели сменного блока исследуемого объекта / Н. В. Горячев, И. Д. Граб, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 169–171.
12. Горячев Н. В. Методика формирования контура печатной платы в САПР электроники с помощью сторонней механической САПР / Н. В. Горячев, Н. К. Юрков // Цифровые модели в проектировании и производстве РЭС. 2010. № 15. С. 127.
13. Горячев Н. В. Средства и методики анализа и автоматизированного выбора систем охлаждения радиоэлектронной аппаратуры / Н. В. Горячев, А. Ю. Меркульев, Н. К. Юрков // Молодой ученый. 2013. № 12 (59). С. 112–115.
14. Горячев Н. В. Концептуальная структура СППР в области выбора теплоотвода электрорадиоэлемента / Н. В. Горячев // Труды международного симпозиума Надежность и качество. 2012. Т. 2. С. 241–241.
15. Бростилов С. А. Волоконно-оптические кабели для волоконно-оптических датчиков / С. А. Бростилов, Т. И. Мурашкина, Т. Ю. Бростилова, А. Ю. Удалов, А. В. Архипов // Труды международного симпозиума Надежность и качество. 2011. Т. 2. С. 108–111.
16. Горячев Н. В. Комплексы и системы теплофизического проектирования электронной аппаратуры / Н. В. Горячев, Ю. А. Сивагина, Е. А. Сидорова // Цифровые модели в проектировании и производстве РЭС. 2011. № 16. С. 178.
17. Подложенов К. А. Разработка энергосберегающих технологий для теплиц / К. А. Подложёнов, Н. В. Горячев, Н. К. Юрков // Современные информационные технологии. 2012. № 15. С. 193–194.
18. Горячев Н. В. Проектирование топологии односторонних печатных плат, содержащих проволочные или интегральные перемычки / Н. В. Горячев, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2011. Т. 2. С. 122–124.
19. Петрянин Д. Л. Анализ систем защиты информации в базах данных / Д. Л. Петрянин, Н. В. Горячев, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 115–122.
20. Горячев Н. В. К вопросу реализации метода автоматизированного выбора системы охлаждения / Н. В. Горячев, И. И. Кочегаров, Н. К. Юрков // Алгоритмы, методы и системы обработки данных. 2013. № 3 (25). С. 16–20.
21. Меркульев А. Ю. Системы охлаждения полупроводниковых электрорадиоизделий / А. Ю. Меркульев, Н. В. Горячев, Н. К. Юрков // Молодой ученый. — 2013. — № 11. — С. 143–145.
22. Горячев Н. В. Исследование и разработка средств и методик анализа и автоматизированного выбора систем охлаждения радиоэлектронной аппаратуры / Горячев Н. В., Танатов М. К., Юрков Н. К. // Надежность и качество сложных систем. 2013. № 3. С. 70–75.
