





В статье, посвященной предыдущей части исследования, была рассмотрена актуальность систем погружной телеметрии, являющихся одними из главных элементов современной автоматизированной и интеллектуальной скважины [1]. Также были приведены особенности моделирования среды передачи данных c использованием комплекса MATLAB/Simulink [2].
Далее рассмотрим особенности моделирования передачи и приема данных посредством фазовой модуляции последовательности Баркера [3, 4].
В работе [3] указано на возможность применения для передачи данных фазовую модуляцию псевдослучайной последовательности Баркера. Поэтому, одной из задач моделирования была проверка возможности достоверной передачи данных через канал связи, смоделированный ранее. Для решения этой задачи была создана модель передатчика, а также приемника, использующий данный метод. На рис. 1 показана модель передатчика.
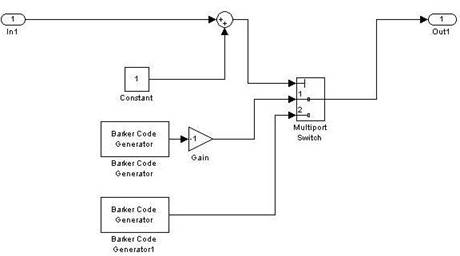
Рис. 1. Модель передатчика, использующего фазовую модуляцию псевдослучайной последовательности Баркера
Для передачи используется тринадцатиэлементная последовательность Баркера:
+1 +1 +1 +1 +1 −1 −1 +1 +1 −1 +1 −1 +1
При передаче логической единицы последовательность будет выглядеть следующим образом:
1111100110101
При передаче логического нуля последовательность будет инвертирована (как видно на модели, на выходе одного из двух генераторов псевдослучайной последовательности установлен инвертор):
0000011001010
На вход данного модуля подается случайный код, формируемый стандартным источником Simulink. Внешний вид модели, предназначенной для тестирования передатчика, показан на рис. 2. Для увеличения амплитуды сигнала с передатчика (блок transmitter), на его выходе установлен блок усилителя с коэффициентом усиления 300. Поэтому, по амплитуде сигнал сопоставим с подававшимися ранее прямоугольными импульсами.
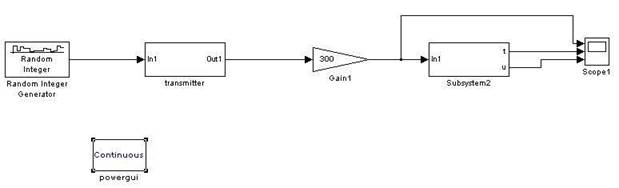
Рис. 2. Модель для тестирования передатчика, использующего фазовую модуляцию последовательности Баркера
Результат работы модели представлен на рис. 3. Как видно, модель реагирует на импульсы с выхода усилителя так же, как она до этого реагировала на прямоугольные импульсы.
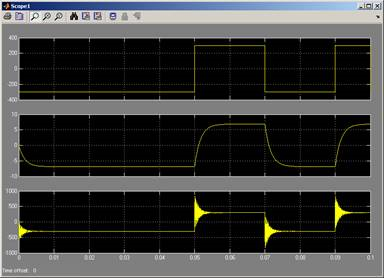
Рис. 3. Форма сигналов модулированной последовательности Баркера — исходная и с выхода измерителей тока и напряжения в нулевой точки модели электродвигателя
Далее рассмотрим методологию приема и распознавания сигнала, передаваемого модулированной последовательностью Баркера.
Для распознавания сигналов управления, поступающих в нулевую точку электродвигателя, воспользуемся автокорреляционной функцией (АКФ). Данная функция обычно вводится для количественной оценки отличия сигнала от его «копии» и равна скалярному произведению полученного сигнала и копии:
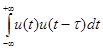
АКФ показывает связь сигнала с копией самого себя, смещенного во времени.
Когда входной сигнал наиболее похож на свою копию — автокорреляционная функция будет иметь пик. Пиков может быть несколько — центральный пик и так называемые боковые лепестки — зависит от функции. Данный метод является самым оптимальным для определения сигнала известной формы на фоне белого шума — имеет наилучшее отношение сигнал/шум. Сигнал должен иметь как можно более узкий центральный пик и при этом иметь минимальный уровень боковых лепестков, т. е. функция похожа сама на себя только в очень коротком интервале времени (рис. 4).
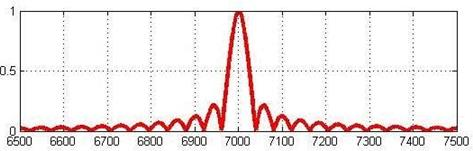
Рис. 4. Автокорреляционная функция, имеющая минимальный уровень боковых лепестков
В нашем случае в качестве «копии» сигнала будет выступать сигнал, принятый из нулевой точки электродвигателя, а в качестве исходного сигнала — образец последовательности, который будет храниться в памяти приемника.
Сигналы принимают два возможных значения  . На пустых местах будем записывать 0. Например: {1, -1, -1, 1}.
. На пустых местах будем записывать 0. Например: {1, -1, -1, 1}.
Сдвигу во времени в аналоговых сигналах, соответствует сдвиг на некоторое число позиций. Примеры:
0 0 0 0 1 1 1 1 0 0 0 0 — исходный сигнал
0 0 0 0 0 1 1 1 1 0 0 0 — сдвиг на 1
0 0 0 0 0 0 1 1 1 1 0 0 — сдвиг на 2
При вычислении автокорреляционной функции дискретного сигнала интегрирование заменяется суммированием, вместо смещения на  используется целое число
используется целое число  , указывающее, на сколько сдвинута копия относительно сигнала:
, указывающее, на сколько сдвинута копия относительно сигнала:
Примером сигнала с хорошей автокорреляционной функцией является последовательность Баркера, у которого уровень боковых лепестков не превышает единицы.
Далее рассмотрим моделирование работы приемника, использующего автокорреляцию.
В моделируемом приемнике используется наиболее простой метод автокорреляции сигнала: принимаемые с порогового устройства биты записываются в регистр сдвига, значение которого с каждой новой записью перемножается с образцовой последовательностью Баркера, хранящейся в памяти приемника. Модель автокорреляционного блока показана на рис. 5 (начало модели) и рис. 6 (окончание модели).
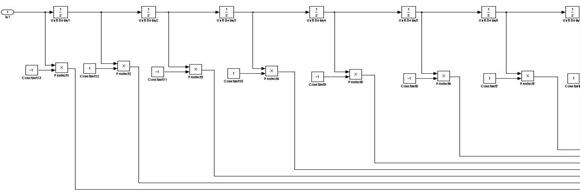
Рис. 5. Модель приемника, использующего автокорреляцию принимаемого сигнала (начало модели)

Рис. 6. Модель приемника, использующего автокорреляцию принимаемого сигнала (окончание модели)
Элементами константы задается последовательность Баркера в форме:
+1 +1 +1 +1 +1 −1 −1 +1 +1 −1 +1 −1 +1
Последовательность, заданная таким образом позволяет выявлять передачу как логической единицы (положительный максимум), так и логического нуля (отрицательный максимум).
С помощью элементов задержки реализуется тринадцатиразрядный регистр сдвига. Результаты перемножения соответствующих разрядов регистра сдвига и разрядов образцовой последовательности подаются на сумматор, а с него на выход модуля.
Схема модели, собранной для проверки работы модуля автокорреляции показана на рис. 7. Как видно на рисунке, блок автокорреляции включен через пороговый элемент к нулевой точке электродвигателя.
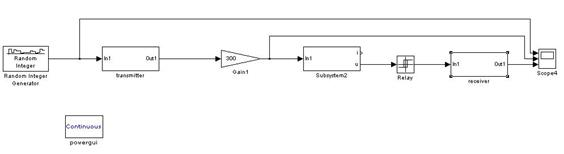
Рис. 7. Модель, демонстрирующая работу блока автокорреляции
На рис. 8 видны пики напряжений, соответствующие единичным и нулевым битам, подаваемым на вход передатчика. Положительный пик соответствует логической единице, отрицательный — логическому нулю.
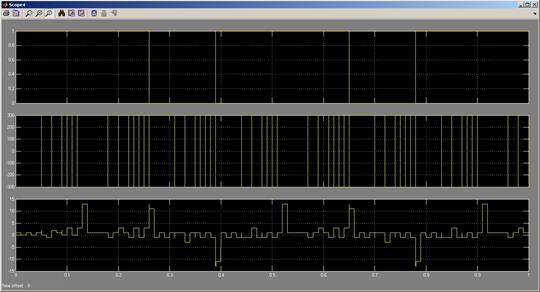
Рис. 8. Результат работы автокорреляционной функции: первая осциллограмма — значения, подаваемые на вход передатчика, вторая осциллограмма — сигнал фазово-модулированной последовательности Баркера, третья осциллограмма — результат работы автокорреляционной функции
В итоговой модели на выходе модуля автокорреляции были установлены пороговые элементы, выделяющие пики, соответствующие нулевым и единичным значениям (рис. 9).
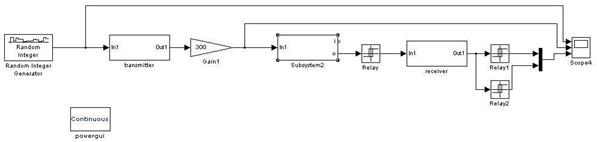
Рис. 9. Общая модель системы передачи данных модуляцией последовательности Баркера
После введения дополнительных пороговых элементов, приемник уверенно распознает единичные и нулевые биты в передаваемой последовательности (рис. 10).
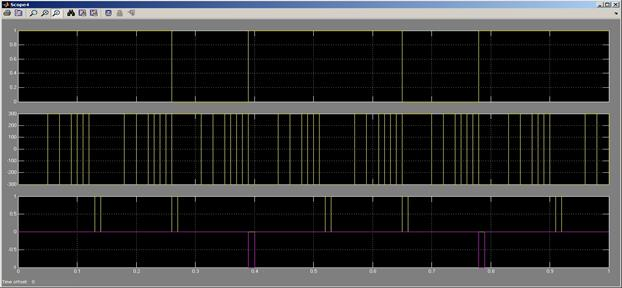
Рис. 10. Результат работы полной модели системы передачи данных с помощью модуляции последовательности Баркера
Как видно из вышеизложенного, с помощью модуля Simulink SimPower Systems удалось создать виртуальную модель среды передачи данных системы погружной телеметрии, а также создать модель приемника и передатчика, использующих фазовую модуляцию псевдослучайной последовательности Баркера. Данная модель реализует передачу данных от наземного блока погружному, как более простую. Добавление возможности передачи данных от погружного блока наземному планируется как один из пунктов развития модели. Результаты, полученные с помощью данной модели, в дальнейшем планируется использовать для построения действующей системы погружной телеметрии.
Литература:
1. Адиев А. Р. «Интеллектуальные» скважины. Мониторинг разработки многопластовых объектов в скважинах с УЭЦН // Инженерная практика. 2010. № 1. С. 66–71.
2. SimPowerSystems. Model and simulate electrical power systems. URL: mathworks.com/products/simpower/.
3. Файзрахманов Р. А., Володин В. Д., Бикметов Р. Р., Шаронов А. А. Использование PLC-технологий в системах погружной телеметрии для нужд нефтедобывающей отрасли // Сборник докладов международной конференции «Наука и общество», февраль 2014, часть 1. Донецк, 2014. С. 56–60.
4. Волынская А. В., Калинин П. М. Новые помехоустойчивые сигналы для интеллектуального канала телемеханики // Фундаментальные исследования. 2012. № 11–4. URL: rae.ru/fs/pdf/2012/11–4/30684.pdf.
