





В работе предлагается метод улучшения качественных показателей процесса регулирования путем введения координирующих элементов в структуру регулятора. Риск возникновения устойчивых предельных состояний системы уменьшается за счет использования координирующего устройства, плавно меняющего структуру регулятора в зависимости от величины ошибки управления.
Ключевые слова: ПИД-регулятор, переключаемая структура регулятора, нелинейный элемент, многозонное координирующее регулирование.
Используемый при проведении синтеза САУ ПИД-регулятор и его модификации являются теоретическими идеализациями реальных регуляторов, поэтому для их практического использования необходимо учесть особенности, порождаемые реальными условиями применения и технической реализации. К таким особенностям относятся [1]:
- конечный динамический диапазон изменений физических переменных в системе (например, ограниченная мощность нагревателя, ограниченная пропускная способность клапана);
- не всегда существующая возможность изменения знака управляющего воздействия (например, в системе поддержания температуры часто отсутствует холодильник, двигатель может не иметь реверсивного хода);
- наличие практически во всех системах нелинейностей: насыщение (ограничение динамического диапазона изменения переменных), ограничение скорости нарастания, гистерезис, люфт и др.;
- технологический разброс и случайные вариации параметров регулятора и объекта;
- дискретная реализация регулятора;
- необходимость плавного (безударного) переключения режимов регулирования.
Указанные особенности требуют специальных подходов к синтезу САУ, введения дополнительных звеньев, анализа робастности системы.
Известен метод формирования управляющего ПИ закона регулирования с переключаемой структурой регулятора [2; 3, c. 76–80; 4, с. 159–160; 5, с. 6–7]. Функциональная схема системы автоматического управления, с регулятором, использующим указанный метод, приведена на рис. 1:
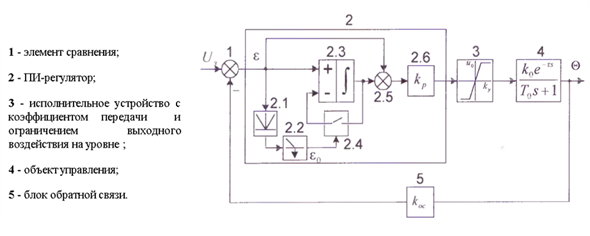
Рис. 1. Функциональная схема САУ на основе регулятора с переключаемой структурой
Недостатком описанного метода формирования ПИ закона регулирования является его высокая чувствительность к выбору значения порога переключения  , определяемому из соотношения:
, определяемому из соотношения:
где  — максимальное входное управляющее воздействие;
— максимальное входное управляющее воздействие;
 — максимальное возмущающее воздействие;
— максимальное возмущающее воздействие;
 — коэффициент передачи разомкнутой системы при статическом регулировании (
— коэффициент передачи разомкнутой системы при статическом регулировании (
 — коэффициент передачи системы по возмущению.
— коэффициент передачи системы по возмущению.
При изменении коэффициентов передачи динамических звеньев системы (коэффициента передачи регулятора  , исполнительного устройства
, исполнительного устройства  , объекта
, объекта  ), выходе значений входного управляющего воздействия или возмущающего воздействия за пределы (, ) возможно возникновение ситуации, когда сигнал ошибки в процессе регулирования не достигнет уровня , и, соответственно, не произойдет включения релейного элемента 2.4 (рис. 1). При этом интегральная часть регулятора останется охваченной отрицательной обратной связью, преобразующей ее передаточную функцию к виду:
), выходе значений входного управляющего воздействия или возмущающего воздействия за пределы (, ) возможно возникновение ситуации, когда сигнал ошибки в процессе регулирования не достигнет уровня , и, соответственно, не произойдет включения релейного элемента 2.4 (рис. 1). При этом интегральная часть регулятора останется охваченной отрицательной обратной связью, преобразующей ее передаточную функцию к виду:
 .
.
Одним из вариантов решения указанной проблемы может стать наблюдение за первой производной сигнала ошибки и, при уменьшении величины модуля сигнала ошибки ниже уровня  , принудительная коммутация ключа 2.4 в разомкнутое положение. Схема, реализующая такое управление, представлена на рис. 2:
, принудительная коммутация ключа 2.4 в разомкнутое положение. Схема, реализующая такое управление, представлена на рис. 2:
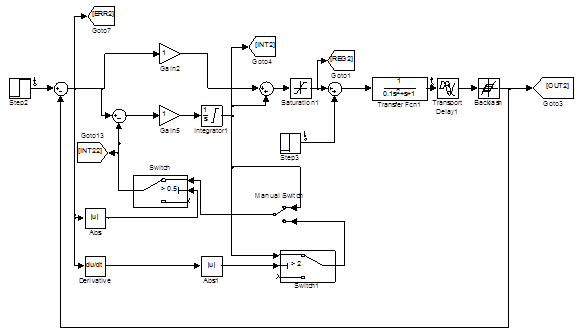
Рис. 2. Схема модели САУ на основе модифицированного регулятора с переключаемой структурой
Модель объекта представляет собой последовательно соединенные апериодическое звено второго порядка с передаточной функцией:
где  — постоянные времени звена, звено задержки (чистого запаздывания) Transport Delay, описываемой передаточной функцией
— постоянные времени звена, звено задержки (чистого запаздывания) Transport Delay, описываемой передаточной функцией  , где —
, где —  — постоянная времени звена чистого запаздывания, и люфта Backlash (т.н. «звена с мертвым ходом») с величиной зоны нечувствительности
— постоянная времени звена чистого запаздывания, и люфта Backlash (т.н. «звена с мертвым ходом») с величиной зоны нечувствительности  Параметры модели примем равными:
Параметры модели примем равными:  . (относительных единиц, принятых в программе имитационного моделирования Matlab/Simulink). Сигнал задания равен 5 ед., в момент времени равный 20 с на вход объекта управления подается возмущающее воздействие, равное (+3) ед.
. (относительных единиц, принятых в программе имитационного моделирования Matlab/Simulink). Сигнал задания равен 5 ед., в момент времени равный 20 с на вход объекта управления подается возмущающее воздействие, равное (+3) ед.
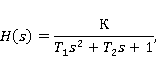
Для сравнения одновременно произведем моделирование системы с аналогичным объектом управления и классическим ПИ-регулятором (рис. 3). Параметры ПИ-регулятора установлены аналогично модели рис. 2.
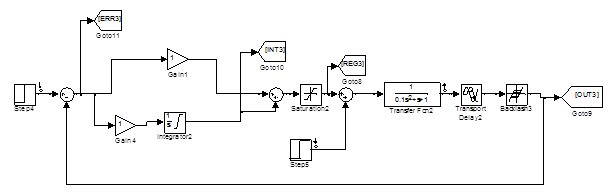
Рис. 3. Схема модели САУ на основе классического ПИ-регулятора
В верхнем положении ключа «Manual Switch» регулятор работает по алгоритму, описанному в [2]. Графики сигналов ошибки системы «ERR2», выходного сигнала интегратора «INT2», выхода объекта управления «OUT2» и выхода регулятора «REG2» после ограничителя уровня, имитирующего ограничения, обусловленные насыщением регулятора, показаны на рис. 4:

Рис. 4. Графики сигналов в САУ с переключаемой структурой
Серым цветом для сравнения показаны графики в системе, представленной на рис. 2. Пунктиром показан сигнал «INT22», соответствующий сигналу ОС, охватывающей интегральную часть регулятора.
Из графиков видно, что, несмотря на значительно меньшую величину перерегулирования переходного процесса системы, показанной на рис. 2,  по сравнению с системой на рис. 3, т. е.
по сравнению с системой на рис. 3, т. е.  , ошибка регулирования в интервале от 12 с до 20 с (до момента приложения внешнего возмущения «Step5») остается на постоянном ненулевом уровне. Ключ «Switch» при этом остается в замкнутом состоянии (пунктирная линия на рис. 4), отрицательная обратная связь, блокирующая интегратор, не отключается. Выходной сигнал
, ошибка регулирования в интервале от 12 с до 20 с (до момента приложения внешнего возмущения «Step5») остается на постоянном ненулевом уровне. Ключ «Switch» при этом остается в замкнутом состоянии (пунктирная линия на рис. 4), отрицательная обратная связь, блокирующая интегратор, не отключается. Выходной сигнал  не достигает уровня, заданного уставкой «Step2» — 5 ед.
не достигает уровня, заданного уставкой «Step2» — 5 ед.
При приложении положительного (ускоряющего) внешнего возмущения величиной 3 ед. в момент времени 20с выходной сигнал достигает уровня уставки, происходит отключение ООС, блокирующей интегральную часть регулятора, регулятор переходит в астатический режим, вследствие чего сигнал ошибки системы  стремится к нулю.
стремится к нулю.
Таким образом, при конфигурации регулятора, соответствующей описанной в [2], возможен переход системы в устойчивое состояние, не соответствующее цели управления.
В пространстве состояний переменных системы  такой режим соответствует устойчивому фокусу «Б», наличие которого обусловлено характеристикой релейного элемента Switch. Переход в другое состояние возможен только при воздействии сигнала возмущения, переводящего систему в состояние, при котором происходит срабатывание ключа «Switch». При этом приложенное воздействие переводит систему в состояние, соответствующее фазовой точке «А» с координатами (0;0), приводя к достижению цели регулирования.
такой режим соответствует устойчивому фокусу «Б», наличие которого обусловлено характеристикой релейного элемента Switch. Переход в другое состояние возможен только при воздействии сигнала возмущения, переводящего систему в состояние, при котором происходит срабатывание ключа «Switch». При этом приложенное воздействие переводит систему в состояние, соответствующее фазовой точке «А» с координатами (0;0), приводя к достижению цели регулирования.
Зона коммутации ключа «Switch» показана на рис. 5 вертикальными штриховыми линиями. Стрелками показаны направления градиента вектора управляющего воздействия для разных зон фазовой плоскости. Горизонтальными штрихами показана линия расположения устойчивых фокусов фазового пространства состояний. Абсцисса точки фокуса в данном случае зависит от коэффициента передачи системы для частоты  и равна для моделируемой системы
и равна для моделируемой системы  :
:

Рис. 5. Зона коммутации ключа «Switch»
При переводе ключа «Manual Switch» в нижнее (по схеме) положение подключается схема контроля производной ошибки регулирования. При уменьшении модуля производной ошибки регулирования до уровня  (установленное в модели равным 2 единицам) ключ «Switch1» принудительно отключает обратную связь, охватывающую интегральную часть регулятора, переводя его в классический режим ПИ-регулирования.
(установленное в модели равным 2 единицам) ключ «Switch1» принудительно отключает обратную связь, охватывающую интегральную часть регулятора, переводя его в классический режим ПИ-регулирования.
Из графиков, представленных на рис. 6, видно, что при малой величине производной ошибки системы происходит принудительное отключение обратной связи, охватывающей интегральную часть регулятора, переводящее его в астатический режим регулирования и не позволяющее регулятору войти в устойчивое состояние при величине ошибки регулирования отличной от нуля. Сигнал в цепи обратной связи показан штриховой линией  .
.

Рис. 6. Графики сигналов в модифицированной САУ с принудительным отключением обратной связи
Величина перерегулирования переходного процесса системы с рис. 2 при этом увеличилась до  , но все равно в 1,6 раза меньше по сравнению с системой, показанной на рис. 3 (). Степень затухания переходного процесса
, но все равно в 1,6 раза меньше по сравнению с системой, показанной на рис. 3 (). Степень затухания переходного процесса  (для системы на рис. 3
(для системы на рис. 3  ).
).
Время переходного процесса по сигналу уставки, определяемое по критерию 5 % отклонения выходной величины от установившегося значения, увеличилось  (для модели рис. 3
(для модели рис. 3  ).
).
В пространстве состояний переменных системы при этом отсутствует точки устойчивых фокусов, отличные от фазовой точки установившегося режима А(0;0), соответствующей цели регулирования. Любое уменьшение модуля производной ошибки до уровня, меньшего порогового значения  , приведет к безударному включению интегральной составляющей регулятора (рис. 7).
, приведет к безударному включению интегральной составляющей регулятора (рис. 7).
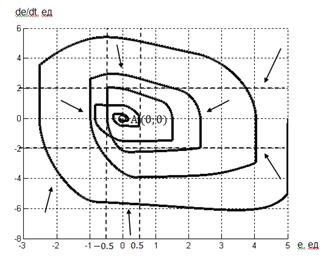
Рис. 7. Зоны коммутации ключей «Switch» и «Switch1»
При этом, как будет показано далее, данный метод не исключает, а скорее даже провоцирует возможность возникновения предельных циклов в системе.
Рассматривая работу системы управления в режиме большой и малой ошибки регулирования очевидна двойственность и противоречивость требований к интегральной составляющей регулятора. При большой величине ошибки должна осуществляется ее быстрая отработка (постоянная времени  мала или равна нулю), напротив, при малой величине должна быть обеспечена высокая точность регулирования (большая величина постоянной времени обеспечивает удовлетворительное подавление высокочастотных возмущений).
мала или равна нулю), напротив, при малой величине должна быть обеспечена высокая точность регулирования (большая величина постоянной времени обеспечивает удовлетворительное подавление высокочастотных возмущений).
Вместе с тем, введение многозонного управления без дополнительных устройств слежения за процессом регулирования (производной ошибки) при неправильном выборе порогов межзонной коммутации, значительном изменении параметров звеньев системы (параметрических возмущениях) или выходящих за пределы расчетных значений величин управляющего или возмущающего воздействий, может привести к возникновению устойчивых точек состояния (фокусов фазовой траектории), соответствующих ненулевой ошибке регулирования.
Возникает классическое противоречие, ситуация, когда должны удовлетворяться противоположные требования: введение многозонного управления приводит к улучшению качества регулирования, но требует дополнительных решений для обеспечения робастности.
Вариант решения данной задачи представлен на рис. 8:
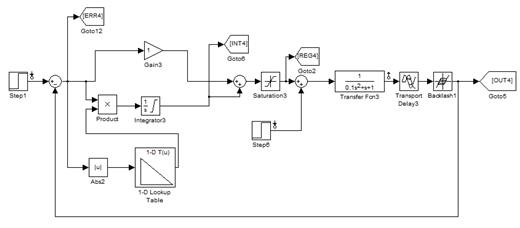
Рис. 8. Схема модели САУ на основе регулятора с нелинейным элементом, модифицирующим его структуру в зависимости от сигнала ошибки регулирования
В представленной на рисунке 8 модели релейные коммутирующие устройства, обеспечивающие зонирование режимов регулятора в зависимости от уровня модуля сигнала ошибки, заменены нелинейным элементом «1-D Lookup Table». Элемент реализует кусочно-линейную интерполяцию заданной функции. Для моделирования была выбрана функция вида:
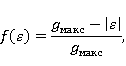
где  — максимальное входное управляющее воздействие, в модели принятое равным 15 единицам;
— максимальное входное управляющее воздействие, в модели принятое равным 15 единицам;
 — ошибка регулирования.
— ошибка регулирования.
При этом  что обеспечивает настройки регулятора для зоны малой ошибки одинаковые с рассмотренными ранее моделями рис. 2 и рис. 3.
что обеспечивает настройки регулятора для зоны малой ошибки одинаковые с рассмотренными ранее моделями рис. 2 и рис. 3.
Передаточная функция такого регулятора будет определятся выражением:
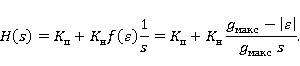
Для режима малых отклонений при  передаточная функция соответствует классическому ПИ-регулятору:
передаточная функция соответствует классическому ПИ-регулятору:
в режиме больших отклонений при  регулятор безударно переходит в пропорциональный режим регулирования
регулятор безударно переходит в пропорциональный режим регулирования  (рис. 9).
(рис. 9).
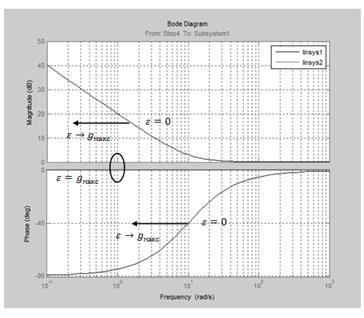
Рис. 9. Модификация ЛАФЧХ регулятора при изменении уровня сигнала ошибки
На рис. 10. представлены результаты моделирования системы с рис. 8 ( ), для сравнения показаны графики, соответствующие системам рис. 2 и рис. 3. Условия моделирования для всех систем идентичны.
), для сравнения показаны графики, соответствующие системам рис. 2 и рис. 3. Условия моделирования для всех систем идентичны.

Рис. 10. Результаты моделирования САУ с модифицируемой структурой регулятора
Время переходного процесса по сигналу уставки  , определяемое по критерию 5 % отклонения выходной величины
, определяемое по критерию 5 % отклонения выходной величины  от установившегося значения составляет около 16 с (для модели рис. 2 , для модели рис. 3 ).
от установившегося значения составляет около 16 с (для модели рис. 2 , для модели рис. 3 ).
Время переходного процесса по сигналу возмущения  составляет около 16 с (для модели рис. 2
составляет около 16 с (для модели рис. 2  , для модели рис. 3
, для модели рис. 3  ).
).
Из графика рис. 10 видно, что величина перерегулирования для модели рис. 8 наименьшая из всех:  . Степень затухания переходного процесса равна
. Степень затухания переходного процесса равна  .
.
При этом нелинейное звено благодаря использованию гладкой функции  не добавляет на фазовую плоскость дополнительных особых точек или областей (рис. 11).
не добавляет на фазовую плоскость дополнительных особых точек или областей (рис. 11).
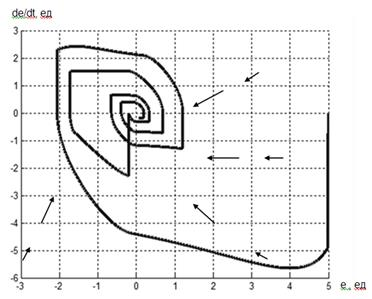
Рис. 11. Фазовый портрет системы с модифицируемой структурой регулятора
Увеличим сигнал задания до величины 10 единиц, при этом характер процессов в системе из-за наличия нелинейных элементов существенно изменится (рис. 12).

Рис. 12. Результаты моделирования САУ с модифицируемой структурой регулятора при увеличении уровня сигнала задания
Из графиков рис. 12 видно, что для системы с классическим ПИ регулятором выходной сигнал интегратора «INT2» быстро (за 1,5 с) достигает уровня ограничения по выходу (15 единиц), и остается в состоянии насыщения 2 с. Напротив, сигнал интегратора «INT4» по модели рис. 8 остается в зоне активного регулирования. Модель рис. 2 при этих параметрах теряет устойчивость и переходит в режим незатухающих колебаний (соответствующий предельному циклу на фазовой плоскости), из которого ее выводит только внешнее возмущение  ед. при t=20 с. Время переходного процесса при этом составляет для модели рис. 8
ед. при t=20 с. Время переходного процесса при этом составляет для модели рис. 8  , для модели рис. 3
, для модели рис. 3  .
.
Вывод: в работе были предложены варианты улучшения качественных показателей процесса регулирования путем введения координирующих элементов в структуру регулятора. Показано, что введение многозонного координирующего регулирования приводит к риску возникновения устойчивых предельных состояний системы (устойчивых фокусов и предельных циклов), не соответствующих цели управления, как следствие снижению робастности системы. Предложено использование координирующего устройства, плавно меняющего структуру регулятора в зависимости от величины ошибки управления. Результаты проведенного сравнительного математического моделирования показывают улучшение качественных показателей переходного процесса при использовании нелинейного алгоритма. При этом предлагаемый метод координирующего управления не вносит в фазовое пространство переменных системы дополнительных (кроме имеющихся в объекте) локальных зон притяжения.
Литература:
1. Денисенко В. В. ПИД-регуляторы: вопросы реализации // Современные технологии автоматизации» № 4/2007, ISSN 0206–975X, М.: СТА-ПРЕСС. С. 86–97.
2. Патент 2150727 РФ, МКИ G05 В 11/36; 23/02. Способ формирования ПИ-закона регулирования и диагностики автоматической системы / С. И. Малафеев, А. А. Малафеева, А. В. Бахирев. — Опубл. 10.06.00. Бюл. № 16.
3. Ходак М.С, Малафеев С. И., Гамаюнов А. Р. Разработка и моделирование адаптивного ПИД-регулятора с переменной структурой // Материалы Международной научно- технической конференции INTERMATIC — 2013, 2–6 декабря 2013 г., часть 3. — М.: МИРЭА, 2013г. C. 76–80.
4. Малафеев С.И, Малафеева А.А, Бахирев А. В. Технические средства контроля и регулирования процессов управления в автоматических системах при критических и аварийных режимах // Физика и радиоэлектроника в медицине и экологии. Сборник тезисов докладов IV международной научно-технической конференции — Владимир: ВлГУ. 2000, т.1. С. 159–160.
5. Малафеев С.И, Бахирев А. В. Исследование автоматического регулирующего устройства с контролем режима работы системы. // Радиоэлектроника и электротехника в народном хозяйстве. Тезисы докладов VI международной научно-технической конференции студентов и аспирантов вузов России — М.: Изд-во МЭИ, 2000, т.2. С. 6–7.
