





Рассмотрение вопроса построения ПИД-регулятора импульсного понижающего преобразователя и его моделирование в пакете прикладных программ «Matlab Simulink».
1. Введение
Работа практически любой электронной схемы требует наличия одного или нескольких источников постоянного напряжения, причем в подавляющем большинстве случаев используется стабилизированное напряжение. В стабилизированных источниках питания применяются либо линейные, либо импульсные стабилизаторы. Несомненным достоинствам импульсных стабилизаторов относятся высокие значения коэффициента полезного действия, возможность получения больших величин выходного тока и высокая эффективность при большой разнице между значениями входного и выходного напряжений. Стабилизация выходного напряжения достигается путем регулирования времени открытого состояния силового ключа относительно периода переключения.
В данной работе рассматривается вопрос стабилизации выходного напряжения понижающего преобразователя посредством ПИД-регулятора путем исследования математической модели.
2. Передаточная функция понижающего преобразователя
Стабилизация выходного напряжения достигается путем регулирования величины рабочего цикла (Duty cycle) посредством обратной связи. Развитие полупроводниковых технологий позволяет создавать цифровую обратную связь, которая является конкурентом аналоговой (рис.1). Цифровая часть преобразователя может быть реализована как в одном корпусе микросхемы, так и состоять из отдельных микросхем показано пунктирной линией на рисунке 1.
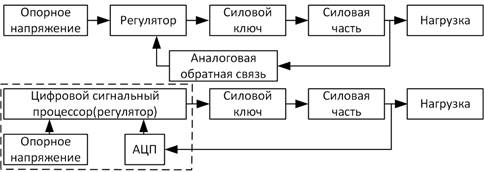
Рис. 1. Аналоговая и цифровая обратная связь понижающего преобразователя
Цифровой преобразователь обладает рядом преимуществ и недостатков в сравнении с аналоговым преобразователем напряжения. Например, программируемость позволяет изменять величину выходного напряжения без замены радиоэлементов в цепи обратной связи. Но программируемость требует знания языка программирования. Как в цифровом, так и в аналоговом преобразователе для расчета регулятора необходима передаточная функция (Transfer Function(Fcn)) силовой части преобразователя напряжения, которая получается из математической модели силовой части. Построение математической модели рассмотрено в работе [1], схема понижающего преобразователя показана на рисунке 2.
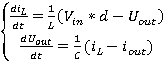
Система дифференциальных уравнений импульсного понижающего преобразователя в форме Коши:
 (1)
(1)
где:
 -ток индуктивности,
-ток индуктивности,
 -рабочий цикл (duty cycle),
-рабочий цикл (duty cycle),
 -ток нагрузки.
-ток нагрузки.
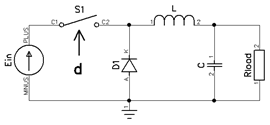
Рис. 2 Схема понижающего преобразователя
Из первого уравнения системы (1) получаем произведение входного напряжения и рабочего цикла:
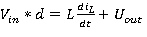 (2)
(2)
Применяем преобразование Лапласа к уравнению (2):
 (3)
(3)
Из второго уравнения системы (1) получаем  :
:
 (4)
(4)
 (5)
(5)
Применяем преобразование Лапласа к уравнению (5):
 (6)
(6)
Подставляя (6) в (3), и осуществляя перестановку членов, получаем передаточную функцию открытой системы (Open-loop):
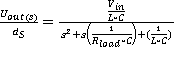 (7)
(7)
Классическая схема управления с единичной отрицательной обратной связью показана на рисунке 3.

Рис. 3 Структурная схема закрытой системы
Назначение регулятора системы заключается в коррекции динамических свойств объекта управления с помощью управляющего сигнала  так, чтобы реальный выходной сигнал
так, чтобы реальный выходной сигнал  как можно меньше отличался от желаемого выходного сигнала
как можно меньше отличался от желаемого выходного сигнала  . Регулятор вырабатывает управление, используя ошибку регулирования
. Регулятор вырабатывает управление, используя ошибку регулирования  .
.
Для оценки динамических свойств системы часто рассматривается реакция на единичное ступенчатое воздействие. Переходный процесс должен отвечать заданным показателям качества, к которым относятся время переходного процесса, перерегулирование и колебательность. Могут быть также использованы интегральные оценки качества переходного процесса.
Передаточная функция (TF) ПИД-регулятора имеет вид [2]:
 (8)
(8)
Общая передаточная функция системы, представленной на рисунке 3, определяется по формуле:
 (9)
(9)
Подставляя в формулу (9) уравнения (7), (8), где  ,
,  , производим упрощение и получаем общую передаточную функцию системы дифференциальных уравнений импульсного понижающего преобразователя напряжения:
, производим упрощение и получаем общую передаточную функцию системы дифференциальных уравнений импульсного понижающего преобразователя напряжения:
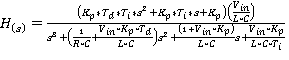 (10)
(10)
Номиналы элементов электрической схемы (рисунок 2) рассчитываются на основе заданных требований к преобразователю напряжения и известных входных параметров сети питания:

 -максимальный выброс напряжения на выходе;
-максимальный выброс напряжения на выходе;  -пульсации напряжения на выходе.
-пульсации напряжения на выходе.
Определяем коэффициент пульсаций тока индуктивности, величину индуктивности и емкость выходного конденсатора:
 (11)
(11)
 (12)
(12)
 (13)
(13)
Полученные значения (12,13) и исходные данные подставляем в уравнение (7). Составим блок-схему в «Matlab Simulink» рисунок 4:
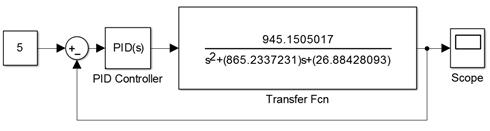
Рис. 4. Структурная схема закрытой передаточной функци в «Matlab Simulink»
Настройка ПИД-регулятора осуществляется с помощью встроенного приложения в «Matlab Simulink» «PID Tuner» (рисунок 5):
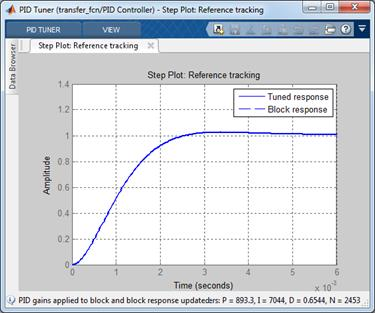
Рис. 5 Окно «PID Tuner»
Моделируя передаточную функцию, получаем осциллограммы выходного напряжения приведенные на рисунке 6:
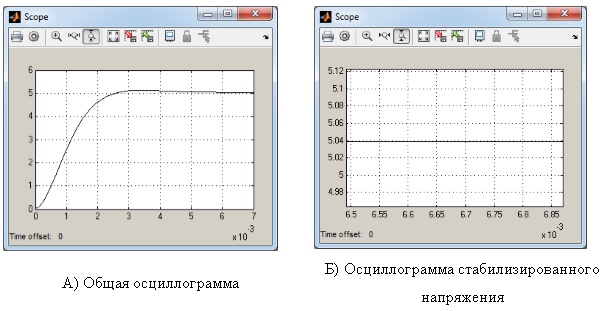
Рис. 6. Осциллограмма выходного напряжения закрытой передаточной функции
3. Заключение.
В данной статье рассмотрены вопросы:
- построения открытой и закрытой передаточных функции понижающего преобразователя напряжения
- настройки ПИД-регулятора для понижающего преобразователя напряжения с помощью «Matlab PIDTuning»
Анализируя осциллограммы выходного напряжения, можно сделать вывод, что ПИД-регулятор может быть применен для стабилизации напряжения в импульсном понижающем преобразователе напряжения.
Полученный ПИД-регулятор в дальнейшем будет исследован на устойчивость работы при внешних возмущениях.
Литература:
1. Межаков О. Г. Математическая модель понижающего преобразователя напряжения // Молодой ученый. — Март 2015 — С. 171–176.
2. Katsuhiko Ogata «Modern Control Engineering» Fifth Edition.
3. В. С. Щербаков, А. А. Руппель, И. В. Лазута, С. А. Милюшенко «Автоматические системы управления в среде Matlab-Simulink», 2010 г.
4. Е. Э. Страшинин «Основы теории автоматического управления», 2000 г.
5. Marian K. Kazimierczuk «Pulse-width modulated dc–dc power converters», 2008 г.
