





Приводится алгоритм параметрической идентификации линейных эргатических систем по экспериментальным данным.
Ключевые слова:эргатические системы, модели, линеаризация, параметрическая идентификация, подготовка операторов.
Известно, в эргатических системах функционирование объекта и оператора настолько тесно связано, что раздельное определение их параметров практически невозможно. С известной долей неопределенности можно свести эргатическую систему к некоторой разомкнутой и определить лишь некоторую обобщенную передаточную функцию. Для этого можно использовать синхронные измерения входных и выходных переменных, полученных в процессе нормальной эксплуатации. Так что параметрическая идентификация возможна лишь с использованием итеративных методов. Такой подход использован для идентификации линеаризованных уравнений продольного движения [1…3]:
 , (1)
, (1)
 — соответственно n-мерный вектор состояния и m-мерный вектор управления,
— соответственно n-мерный вектор состояния и m-мерный вектор управления,  — матрицы коэффициентов.
— матрицы коэффициентов.
В конечных разностях получим
или

или

или
 ,
,
 ,
,

 , (1')
, (1')
 ,
,  .
.
Откуда
 ,
,
 ,
,
…
 . (2)
. (2)
Введем  -мерный вектор
-мерный вектор
 (3)
(3)
и  - матрицу
- матрицу

 . (4)
. (4)
Из (2)-(4) следует
 . (5)
. (5)
Векторно-матричное уравнение (5) описывает систему с входами  и nвыходами
и nвыходами 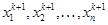 (рис.1). Здесь определяются изолированно. Поэтому
(рис.1). Здесь определяются изолированно. Поэтому  , определяемое по i-му уравнению системы (2), является единственной выходной координатой системы с входами (рис.2).
, определяемое по i-му уравнению системы (2), является единственной выходной координатой системы с входами (рис.2).
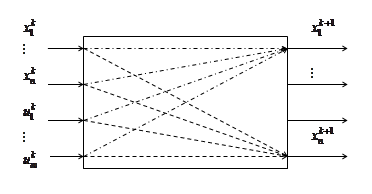
Рис. 1.
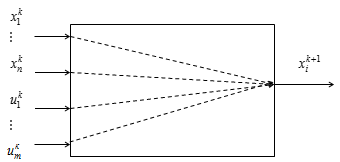
Рис. 2.
Для параметрической идентификации уравнения
 ,
, 
необходимы  совокупностей синхронных измерений и :
совокупностей синхронных измерений и :
 ,
,
…
 (6)
(6)
Из предыдущего следует, что приведенные в (6) измерения для каждого i-го выхода удовлетворяют соотношениям:


…
 , (7)
, (7)
где
 ;
;
 . (8)
. (8)
Из (7) следует
 ,
,  ,
,
 .
.
Из (2), (7), (8) получим матричное уравнение
 .
.
Таким образом, оценки элементов матриц определятся по соотношениям (1') и

 .
.
Пример составления матриц  для продольного движения приводится рис.3 (используются стандартные обозначения для углов тангажа
для продольного движения приводится рис.3 (используются стандартные обозначения для углов тангажа  , атаки
, атаки  и отклонения руля
и отклонения руля  ).
).
|
|
|
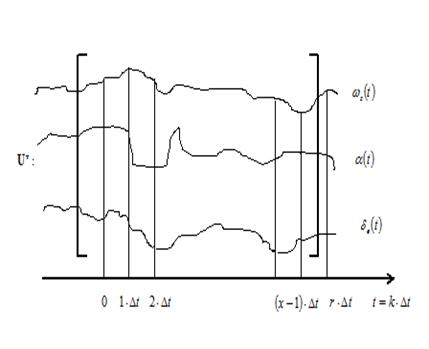
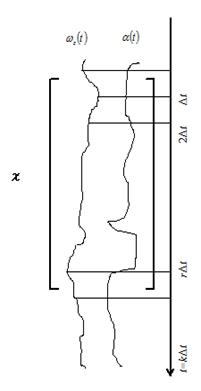
Рис. 3. Схема определения матриц по синхронным измерениям фазовых координат
Литература:
1. Авиационные тренажеры модульной архитектуры: монография; под редакцией Лапшина Э. В., д.т.н., проф. Данилова А. М. — Пенза, ИИЦ ПГУ. — 2005. — 146 с.
2. E. Budylina, A. Danilov, I. Garkina. Control of multiobjective complex systems / Contemporary Engineering Sciences, Vol. 8, 2015, no. 10, 441–445. http://dx.doi.org/10.12988/ces.2015.5276.
3. Будылина Е. А., Гарькина И. А., Данилов А. М. Приближенные методы декомпозиции при настройке имитаторов динамических систем / Региональная архитектура и строительство. — 2013. — № 3. — С. 150–156.
