




Целью данной работы является вывод математического аппарата, описывающего процессы в асинхронном двигателе, в доступной для понимания студентами форме. Открытия сделанные учеными в 1940-50 г.г. при исследовании асинхронных двигателей оказывают потрясающие воздействия. В данной работе сделана попытка реконструкции хода исследовательской мысли ученых и передачи студентам специфической красотыв движениях математических формул. Пройти школу на материалах такого наследия является важнейшим условием формирования будущих исследователей.
Вначале, на примере мгновенных трехфазных напряжений в косинусоидальной форме сдвинутых во времени на 120° с помощью формулы Эйлера (1707…1783 г.г.) преобразовываются в виде степенных функций. Переход к степенным функциям позволяет производить замену произведений множества тригонометрических формул в простые алгебраические суммы выражений находящихся в степени. Далее, используя известную формулу суммы от произведения мгновенных значений напряжений по фазам на соответствующие единичные векторы переходим к пространственному вектору напряжения статора вращающемуся с циклической частотой питающего напряжения (в данной работе рассматривается двухполюсный двигатель). Аналогично производится переход к пространственным токам статорных и роторных величин, причем фазовые сдвиги токов естественно отразятся в пространственном расположении векторов. В потокосцеплениях фаз статора и ротора показаны взаимосвязи от угла поворота магнитных осей. Перед взглядом студентов предстает множество уравнений с переменными коэффициентами. При переходе к пространственным векторам происходит существенное сокращение числа уравнений. Производные от угла поворота магнитных осей дают скорость вращения ротора.
1. Преобразование мгновенных значений напряжений в степенные функции
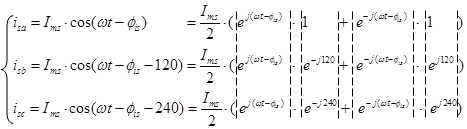
Мгновенные значения трехфазных напряжений описываются следующими зависимостями:
|
|
|
где  - циклическая частота напряжения, рад/c.
- циклическая частота напряжения, рад/c.
На рис. 1 показана связь мгновенных значений напряжений  с векторами
с векторами  во временной системе координат, как их проекции на действительную ось
во временной системе координат, как их проекции на действительную ось 
 Работа в векторной форме существенно ускоряет процесс исследования, причем в любой момент времени легко перейти к косинусоидальной форме мгновенных значений. Выполнить, например, произведение множества косинусоид (синусоид) представляет довольно трудоемкую задачу, а в векторной форме произвести перемножение значительно легче.
Работа в векторной форме существенно ускоряет процесс исследования, причем в любой момент времени легко перейти к косинусоидальной форме мгновенных значений. Выполнить, например, произведение множества косинусоид (синусоид) представляет довольно трудоемкую задачу, а в векторной форме произвести перемножение значительно легче.
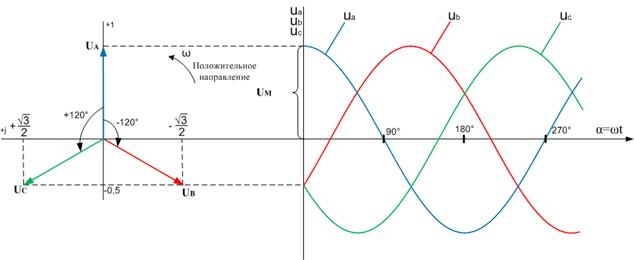
Рис. 1. Связь мгновенных значений напряжений с векторами, соответствующими во временной системе координат
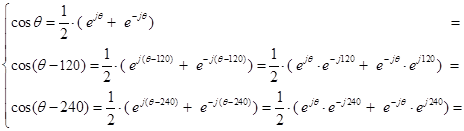
Не меньшую роль в ускорении процессов математических преобразований играет представление с помощью формулы Эйлера мгновенных значений в степенные функции.
Выразим систему уравнений  через степенные функции:
через степенные функции:
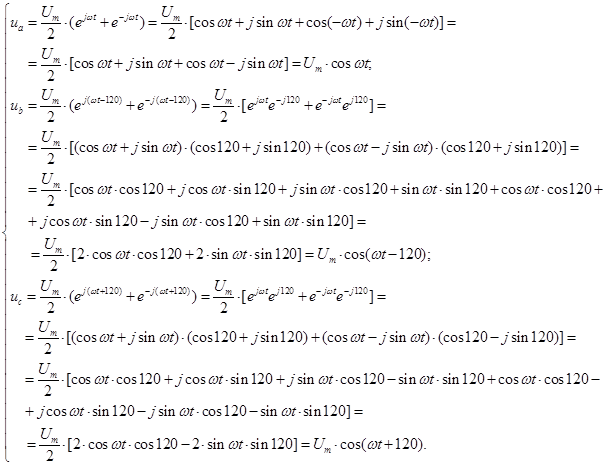
Итак, система уравнений в степенной форме имеет следующий вид:
|
|
|
2. Переход от мгновенных значений напряжений к пространственному вектору 
Пространственный вектор напряжения определяется по следующей зависимости:
|
|
|
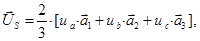
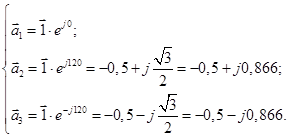
где  - единичные пространственные векторы.
- единичные пространственные векторы.
|
|
|
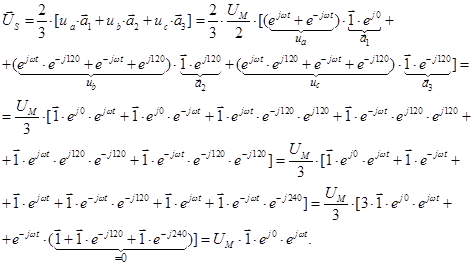
Подставив в уравнение  мгновенные значения напряжений в степенной форме
мгновенные значения напряжений в степенной форме  и единичные пространственные векторы
и единичные пространственные векторы  получим:
получим:
Геометрический смысл преобразования мгновенных значений напряжений в пространственный вектор показан на рис. 2 (в электронном варианте все векторы и их проекции даны в цветном варианте).
Последовательность построений: во временной системе координат определяются мгновенные значения векторов на действительную ось  далее они переносятся на действительную ось в пространственную систему координат в виде отрезков. Затем осуществляется разворот этих отрезков с помощью единичных пространственных векторов. Далее производиться геометрическая сумма
далее они переносятся на действительную ось в пространственную систему координат в виде отрезков. Затем осуществляется разворот этих отрезков с помощью единичных пространственных векторов. Далее производиться геометрическая сумма  и наконец, умножив полученный вектор на множитель
и наконец, умножив полученный вектор на множитель  получим искомый вектор
получим искомый вектор 
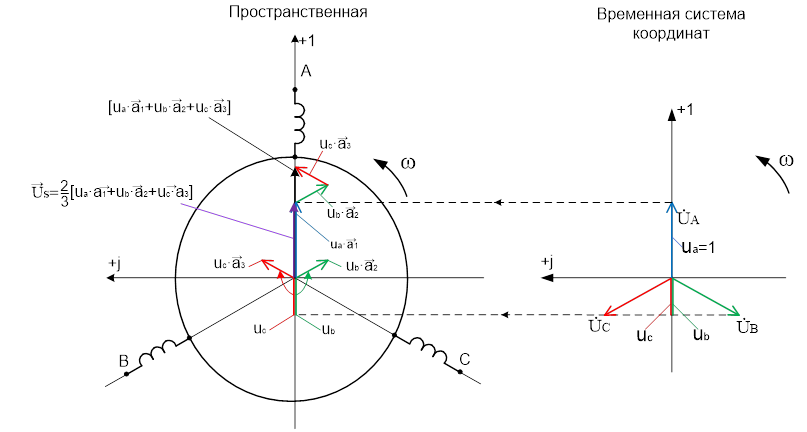
Рис. 2. Геометрический смысл построения пространственного вектора  по составляющим
по составляющим  и
и 
3. Основные уравнения асинхронного двигателя в фазных переменных статора и ротора
Обобщенная асинхронная машина показана на рис. 3.
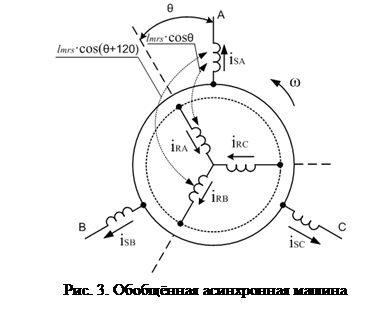
Rs, ls, lms – параметры статорной обмотки,
Rr, lr, lmr – параметры роторной обмотки,
|lmsr|=|lmrs|=|lm| – коэффициенты взаимоиндуктивности при совпадении магнитных осей статора и ротора 
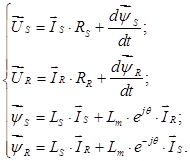
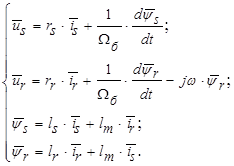
Баланс фазных напряжений статорных и роторных цепей:
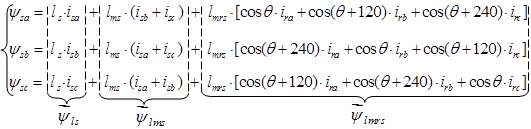
Потокосцепление фаз статорных и роторных цепей с учетом взаимоиндуктивностей с переменными коэффициентами, зависящими от расположения магнитных осей ротора и статора:
|
|
(11) (12) (13) (14) (15) (16) |


4. Преобразование балансов напряжений в фазных переменных в соответствующий баланс пространственных векторов
Умножив обе части уравнения  на единичный пространственный вектор
на единичный пространственный вектор  уравнения
уравнения  и
и  – соответственно на
– соответственно на  и
и  Далее, просуммируем уравнения:
Далее, просуммируем уравнения:

В векторной форме баланс напряжений для статора:
|
|
|

Аналогично, произведем преобразование баланса напряжений для роторных фазных переменных:

В векторной форме баланс напряжений для ротора:
|
|
|

5. Вектор потокосцепления статора АД
Пространственный вектор потокосцепления статора:
|
|
|


где  - мгновенные значения потокосцеплений статора;
- мгновенные значения потокосцеплений статора;
 ,
,  ,
,  - единичные пространственные векторы.
- единичные пространственные векторы.
Уравнения  ÷
÷  представим по трем столбцам соответствующих индуктивностей:
представим по трем столбцам соответствующих индуктивностей:
|
|
|

Первое уравнение умножим на единичный пространственный вектор второе – на  и последнее уравнение
и последнее уравнение  – на
– на  . С целью уменьшения громоздкости получаемых выражений вначале произведем суммирование отдельно по вертикальным столбцам, а затем приведем сумму в соответствии с формулой
. С целью уменьшения громоздкости получаемых выражений вначале произведем суммирование отдельно по вертикальным столбцам, а затем приведем сумму в соответствии с формулой  .
.
Переведем мгновенные значения токов статора и ротора с фазными переменными в степенные функции:
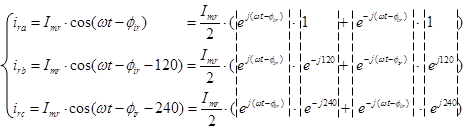
Аналогично, представим 
 и
и  в степенной форме:
в степенной форме:
Или иначе, в удобной для запоминания форме:
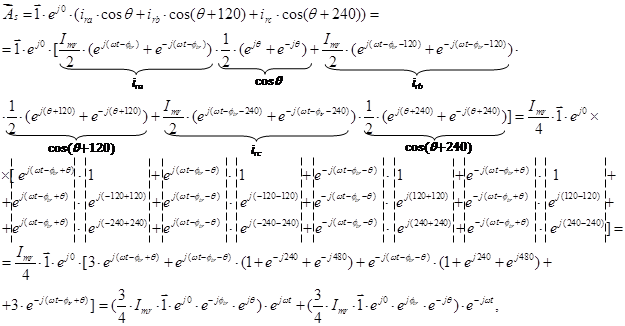
Для первого столбца уравнения (20) определим пространственный вектор  :
:





Потокосцепление можно выразить в следующей форме:



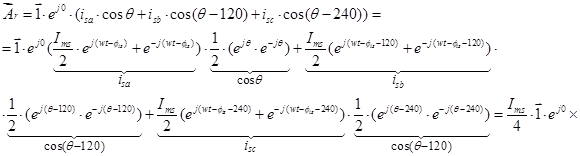
Наконец, для третьего столбца:
 ,
,
где 


где 


Обозначим  ;
;  ;
;  ;
;  .
.
Окончательно, вектор потокосцепления статора [1]:
|
|
|


6. Вектор потокосцепления ротора АД
|
|
|


Уравнения (14) ÷ (16) представим по трём столбцам соответствующих индуктивностей:
|
|
|

Первое уравнение умножим на  , второе – на
, второе – на  , третье – на
, третье – на  . Вначале произведем суммирование отдельно по вертикальным столбцам, а затем приведем полную сумму в соответствии с формулой (22).
. Вначале произведем суммирование отдельно по вертикальным столбцам, а затем приведем полную сумму в соответствии с формулой (22).
Пространственный вектор для первого столбца  :
:



Пространственный вектор для второго столбца системы уравнений (23):

Пространственный вектор для третьего столбца (23):
 ,
,






Обозначим ; ;  ;
;  .
.
Окончательно, вектор потокосцепления ротора:
|
|
(24) |
7. Векторные уравнения АД в различных системах координат
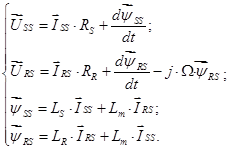
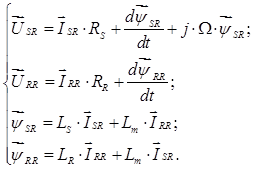
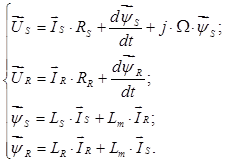
Основные уравнения асинхронного двигателя в векторной форме имеют вид:
|
|
|




Сделаем существенное замечание по полученным обобщенным векторам. В уравнении (25) векторы  ,
,  ,
,  записаны в неподвижной системе координат статора, но в некоторых задачах их необходимо привести к другим системам координат. Рассмотрим схему преобразования одного из векторов, например, из одной системы координат в другую. Поясним это преобразование на следующем рис. 4.
записаны в неподвижной системе координат статора, но в некоторых задачах их необходимо привести к другим системам координат. Рассмотрим схему преобразования одного из векторов, например, из одной системы координат в другую. Поясним это преобразование на следующем рис. 4.
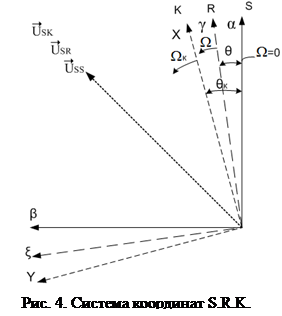
 – неподвижная система координат статора
– неподвижная система координат статора  ;
;
 – система координат, связанная с ротором;
– система координат, связанная с ротором;
 - угол сдвига системы координат R по отношению к S, причем
- угол сдвига системы координат R по отношению к S, причем  ;
;
 – произвольная система координат,
– произвольная система координат,  - угол сдвига к неподвижной системе
- угол сдвига к неподвижной системе (
( );
);
 – пространственный вектор напряжения статора.
– пространственный вектор напряжения статора.
 и
и  – этот же пространственный вектор напряжения статора в системах координат ротора
– этот же пространственный вектор напряжения статора в системах координат ротора  и
и  соответственно.
соответственно.
Связь между векторами в разных системах координат:
Система уравнений (25) – (28) примет следующий вид:
|
|
(29) |
где  ,
,  ,
,  – записаны в не подвижной системе координат статора
– записаны в не подвижной системе координат статора  .
.
|
|
(30) |
где  ,
,  ,
,  – пространственные векторы роторных величин в роторной системе координат R.
– пространственные векторы роторных величин в роторной системе координат R.
|
|
(31) |

где , – векторы потокосцепления и ток статора в неподвижной системе координат S, а – в роторной системе координат сдвинутой в неподвижной системе на угол  .
.
|
|
(32) |

где , – векторы потокосцепления и ток ротора в роторной системе координат R, а – в неподвижной системе координат .
7.1 Приведение векторных уравнений к неподвижной системе координат статора
Уравнение (20) уже записано в статорной системе координат, поэтому показываем процесс приведения следующего уравнения. Для этого умножим обе части уравнение (21) на  :
:
 .
.
В соответствии с вышерассмотренной схемой приведения векторов из одной системы координат в другую, получим:
 и
и  .
.
Выражение  преобразуем к следующему виду:
преобразуем к следующему виду:
 .
.
Окончательно  .
.
В выражении  представим:
представим:  , тогда
, тогда
 ;
;
 .
.
В уравнении (27) умножим обе части на  :
:
 ,
,
 .
.
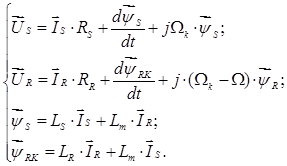
Окончательно уравнения (24) ÷ (27) в статорной системе координат примет следующий вид:
Опуская индекс «статорная система координат», получим:
|
|
(33) |
7.2 Приведение уравнений к роторной системе координат
Умножим обе части уравнение (24) на  :
:
 ;
;
 ;
;
 .
.
Уравнение (25) перепишем без изменений, т.к. оно уже записано в роторной системе координат:
 .
.
Уравнение (26) умножим обе части на :
 ;
;
 .
.
В уравнении (27) выразим  , тогда
, тогда
 ;
;
 .
.
Окончательно в роторной системе координат уравнения (24) ÷ (27) имеют следующий вид:
Опуская индекс «роторная система координат», получим:
|
|
(34) |
7.3. Приведение уравнений к системе координат вращающейся с произвольной скоростью 
Уравнение (24) умножим на  и сразу выразим
и сразу выразим  :
:
 ;
;
 ;
;
 .
.
Уравнение (25) умножим на  :
:
 ;
;
 ;
;
 .
.
Уравнение (26) умножим на  , тогда
, тогда
 , т.к.
, т.к.  , то
, то
 .
.
Уравнение(27) умножим на , тогда
 ;
;
 .
.
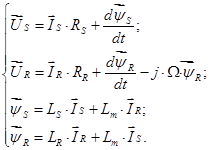
Для системы координат вращающейся с произвольной скоростью  система уравнений:
система уравнений:
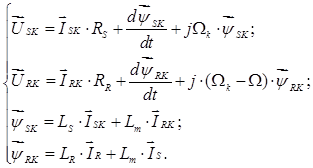
Опуская индекс «произвольная система координат», получим:
|
|
(35) |
В работах [2, с. 196], [3, с. 457] Т-образная схема замещения для одной фазы имеет следующий вид:
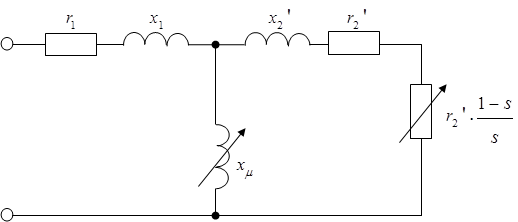
Рис. 5. Т-образная схема замещения фазы АД
 и
и  - активные сопротивления обмоток статора и ротора;
- активные сопротивления обмоток статора и ротора;
 и
и  - индуктивные сопротивления рассеяния обмоток статора и ротора;
- индуктивные сопротивления рассеяния обмоток статора и ротора;
 - индуктивное сопротивление намагничивающего контура [3, с. 457].
- индуктивное сопротивление намагничивающего контура [3, с. 457].
 - относительная разность скоростей вращения поля (
- относительная разность скоростей вращения поля ( ) и ротора (
) и ротора ( ).
).

Связь между скоростью вращения в об/мин с циклической частотой в рад/с следующая:
 - циклическая частота вращения поля, рад/c;
- циклическая частота вращения поля, рад/c;
 - циклическая частота вращения ротора, рад/c.
- циклическая частота вращения ротора, рад/c.
Скольжение s выражено через циклические частоты:
 , тогда
, тогда  .
.
Для анализа режимов частотного управления асинхронными двигателями целесообразно представить индуктивные сопротивления через индуктивности.
Сделаем привязку параметров, принятых в данной статье, с параметрами в схеме замещения на рис. 5 (обозначения приняты для системы в абсолютных единицах):
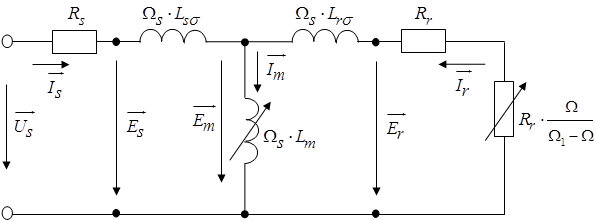
Рис. 6. Т-образная схема замещения для частотного управления в а.е.
 - активное сопротивление статорной обмотки, Ом;
- активное сопротивление статорной обмотки, Ом;
 - активное сопротивление роторной обмотки, приведенного к статорной обмотке, Ом;
- активное сопротивление роторной обмотки, приведенного к статорной обмотке, Ом;
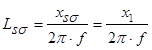 - индуктивность рассеяния статорной обмотки, Гн;
- индуктивность рассеяния статорной обмотки, Гн;
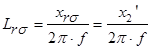 - индуктивность рассеяния роторной обмотки, Гн;
- индуктивность рассеяния роторной обмотки, Гн;
 - индуктивность от главного потока, Гн;
- индуктивность от главного потока, Гн;
 - циклическая частота напряжения сети, рад/с.
- циклическая частота напряжения сети, рад/с.
В обозначениях, приведенных в уравнении (21) и (24):
 ;
;
 , отсюда
, отсюда 
В работе [3, с. 457] аналогичные выражения связей параметров в привязке к параметрам схемы замещения на рис. 5 даны в следующем виде:
 - сопротивление взаимной индуктивности;
- сопротивление взаимной индуктивности;
 ;
;
 ;
;
 ;
;
 ,
,
где  - частота напряжения сети;
- частота напряжения сети;
 - индуктивность собственной статорной обмотки;
- индуктивность собственной статорной обмотки;
 - индуктивность собственной роторной обмотки;
- индуктивность собственной роторной обмотки;
 - взаимоиндуктивность фаз статорных обмоток;
- взаимоиндуктивность фаз статорных обмоток;
 - взаимоиндуктивность фаз роторных обмоток;
- взаимоиндуктивность фаз роторных обмоток;
 ,
,  ,
,  ,
,  ,
,  - относительные значения параметров приводятся в справочниках, например [4].
- относительные значения параметров приводятся в справочниках, например [4].
 ;
;  ;
;  ;
;  ;
;  .
.
Для перехода к системе относительных единиц введем базовые величины [5, с. 117]:
 - амплитуда номинального фазного напряжения;
- амплитуда номинального фазного напряжения;
 - амплитуда номинального фазного тока;
- амплитуда номинального фазного тока;
 - номинальная угловая частота напряжения статора;
- номинальная угловая частота напряжения статора;
 - угловая скорость ротора в режиме идеального холостого хода при номинальной частоте напряжения статора;
- угловая скорость ротора в режиме идеального холостого хода при номинальной частоте напряжения статора;
 = 1 эл. рад. – единица измерения углов;
= 1 эл. рад. – единица измерения углов;
 - время;
- время;
 - потокосцепление;
- потокосцепление;
 - индуктивность;
- индуктивность;
 - сопротивление;
- сопротивление;
 - мощность, равная номинальной электромагнитной мощности двигателя;
- мощность, равная номинальной электромагнитной мощности двигателя;
 - момент, равный номинальному электромагнитному моменту двигателя;
- момент, равный номинальному электромагнитному моменту двигателя;
 - коэффициент, равный отношению полной мощности на зажимах обмотки статора к электромагнитной мощности в номинальном режиме.
- коэффициент, равный отношению полной мощности на зажимах обмотки статора к электромагнитной мощности в номинальном режиме.
Относительные значения амплитуд напряжения на зажимах обмотки статора и электродвижущих сил (полной ЭДС обмотки статора; ЭДС, наводимой в обмотках машин главным магнитным потоком; полной ЭДС обмотки ротора):
 ;
;  ;
;  ;
;  .
.
Относительные значения амплитуд тока статора, тока намагничивания и тока ротора:
 ;
;  ;
;  .
.
Относительные значения амплитуд потокосцепления статора, главного потокосцепления и потокосцепления ротора:
 ;
;  ;
;  .
.
Относительный электромагнитный момент двигателя и момент статического сопротивления механизма:
 ;
;  .
.
Относительные угловая частота напряжения статора и скорость вращения ротора с учетом числа пар полюсов  :
:
 ;
;  .
.
По значениям относительной частоты напряжения статора и скорости вращения ротора может быть следующим образом определено абсолютное скольжение ротора двигателя:
 .
.
Относительные значения активных сопротивлений в Т-образной схеме замещения (рис. 7) определяются выражениями:
 - относительное активное сопротивление обмотки статора;
- относительное активное сопротивление обмотки статора;
 - относительное активное сопротивление обмотки ротора, приведенное к цепи статора.
- относительное активное сопротивление обмотки ротора, приведенное к цепи статора.
Индуктивные сопротивления в данных каталога даются при номинальной частоте [5]. Для анализа режимов частотного управления более удобно перейти от индуктивных сопротивлений к индуктивностям, которые в общем случае определяются формулой:
 ,
,
где f – частота, при которой определено значение индуктивного сопротивления.
Индуктивности и индуктивные сопротивления реактивных элементов схемы замещения связаны соотношениями:
 ;
;  ;
;  .
.
В системе относительных единиц они представляются следующим образом:
 - относительная индуктивность от главного магнитного потока;
- относительная индуктивность от главного магнитного потока;
 - относительная индуктивность рассеяния обмотки статора;
- относительная индуктивность рассеяния обмотки статора;
 - относительная индуктивность рассеяния обмотки ротора, приведенная к цепи статора.
- относительная индуктивность рассеяния обмотки ротора, приведенная к цепи статора.
Схема замещения асинхронного двигателя при переменной частоте [5, с. 120]:
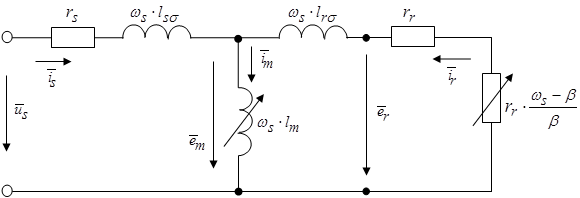
Рис. 7. Схема замещения асинхронного двигателя при переменной частоте
Примечание: при переходе от Т-образной схемы (рис. 6) в абсолютных единицах к схеме замещения на рис. 7 сделаны следующие преобразования:
1. 
 ,
,
где  - циклическая (угловая) частота вращения поля.
- циклическая (угловая) частота вращения поля.
2.  ,
,
где  .
.
3.  .
.
4.  .
.
Для неподвижной системы координат были получены следующие уравнения:
|
|
(36) |
|
(37) |
|
|
(38) |
|
|
(39) |
Переведем эти уравнения в систему относительных единиц. Обе части уравнения (36) разделим на  :
:
 ,
,
где 

Аналогичные уравнения произведем для второго уравнения:
В уравнении (38) обе части умножим на  :
:
 ,
,
где 




Аналогично в уравнении (39) умножим обе части на :


Окончательно, система уравнений в относительных единицах примет вид:
|
|
(40) |
|
(41) |
|
|
(42) |
|
|
(43) |
Литература:
1. Ковач К.П., Рац И. Переходные процессы в машинах переменного тока / Пер. с нем. - М.Л.: Госэнергоиздат, 1963. - 735 с.: ил.
2. Копылов И.П. Проектирование электрических машин: Учеб. пособие для вузов / И.П. Копылов, Ф.А. Горяинов, Б.К. Клоков и др. – М.: Энергия, 1980. – 496 с.
3. Чиликин М.Г. Основы автоматизированного электропривода: Учеб. пособие для взуов / М.Г. Чиликин, М.М. Соколов, В.М. Терехов, А.В. Шинянский. – М.: Энергия, 1974. – 568 с.
4. Кравчик А.И. Асинхронные двигатели серии 4А. Справочник: Энергоиздат, 1982. – 502 с.
5. Шрейнер Р.Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р.Т. Шрейнер, А.В. Костылев, В.К. Кривовяз, С.И. Шилин; под. Ред. проф. д.т.н. Р.Т. Шрейнера. – Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. – 361 с.
