





Im gegebenen Artikel ist der Algorithmus der Durchführung der Forschungen der Systeme der Suche und der Erkennung von Verkehrszeichen beschrieben. Die Kriterien der Organisation und der Durchführung des Experimentes und ebenso die individuellen Besonderheiten der Durchführung des Experimentes je nach dem Modell des Autos sind bestimmt. Die Hauptkriterien für die sichere Arbeit solcher Systeme in Russland sind bestimmt.
Schlüsselwörter: der Algorithmus der Prüfung; das System der Suche und der Erkennung von Verkehrszeichen; das Experiment; die Kriterien des Experimentes; der Bremsweg; die Fahrersreaktion.
Zurzeit entwickeln sich verschiedene computerintellektuelle Systeme und Komplexe aktiv, die verschiedene technologische Prozesse nach der aus den Systemen der Videofixierung bekommenen Datenanalyse automatisieren. In diesem Zusammenhang entsteht es die Notwendigkeit der Bearbeitung der graphischen Informationen, was zur Entwicklung der visuellen Systeme von Computern angestoßen hat. Seit kurzer Zeit, sind die ähnlichen Systeme von den Autoproduzenten für die Bildung der Komplexe der aktiven Autosicherheit und der Systeme der Hilfe des Fahrers immer öfter verwendet. Zurzeit verfügen die existierenden Systeme über die äußerst begrenzten Möglichkeiten, was sie in den Autos mit der robotanwendenden Verwaltung aktiv nicht zu verwenden erlaubt. Mit der Bildung solcher Autos beschäftigt sich jetzt eine Menge der Gesellschaften aktiv: Google, Apple, General Motors, Daimler, in Russland werden die ähnlichen Arbeiten vom Autokonzern KamAs geführt. Eines der wichtigsten Elemente solcher Komplexe ist das System der Suche und der Erkennung von Verkehrszeichen, die Fahrsituation konkretisieren, und rechtzeitig, auf die tauschenden Fahrbedingungen reagieren zulässt.
Das System der Suche und der Erkennung von Verkehrszeichen ist Hardware-Softwaremittel, einschließende in sich eine ganze Reihe von Elementen, jeder von denen das Endergebnis beeinflusst, und zwar die Richtigkeit und die Genauigkeit der Erkennung, also muss man die Prüfung solches Systems sowohl komplex, als auch die Prüfung jedes Elementes durchführen. Die Korrektheit der Arbeit solcher Systeme wird eines der wichtigsten der Sicherheitsaspekte, infolgedessen, sind die experimentalen Forschungen der Prüfung der ähnlichen Systeme notwendig, unter anderem für ihre vergleichende Analyse. So kann man über die hohe Aktualität der Bildung der standardmäßigen Methoden der Organisation der experimentalen Forschungen der Systeme der Suche und der Erkennung von Verkehrszeichen sagen.
Das Ziel der Forschung ist die Entwicklung des Algorithmus der Prüfung der automatisierten Systeme der Erkennung von Verkehrszeichen für die Sicherheit des Straßenverkehrs.
Für die Lösung des gestellten Ziels ist die Lösung einer ganzen Reihe der Aufgaben notwendig, die insgesamt abgesonderte experimentale Forschungen sind und lassen die Qualität des Systems bestimmen. Wobei man sie bedingt in drei Teile teilen kann: die Algorithmusforschungen, die Prüfung des Hardwaresystems (mit der montierten Software, realisierenden Algorithmus) die Prüfung des Systems in den realen Bedingungen. Dabei wird die Einschätzung der Arbeit durch das vereinte Ergebnis der Suche und der Erkennung geführt und, ebenso als im Fall mit dem Forschungalgorithmus abgesondert die Qualität der Suche und die Qualität der Erkennung. Im Verlauf des Entwicklungssystems für die Minimierung der Wirtschaftsaufwände der Durchführung des Experimentes, ist es nötig die komplexe Forschung nach den Aufgaben auf vier Etappen zu teilen.
Die erste Etappe ist die Prüfung des Algorithmus. Für die Durchführung der ähnlichen Prüfungen entsteht die Basis der Prüfungsvideoreihenfolgen, die vorläufig auf einige Videokameras mit verschiedenen Charakteristiken der Aufnahme aufgenommen sind: 25 und 30 Einzelbilder in der Sekunde, und ebenso mit verschiedenen Scharfzeichnung von den minimalen 240х320 bis zu empfohlenen FullHD 1920x1080; und ebenso laut bestimmten Kriterien [5]. Am optimalsten als Kamera ist es die Anlage zu verwenden, die im endlichen System verwendet werden wird. Ebenso ist die Verwendung der universellen Basis der Videoaufzeichnungen möglich, die für den qualitativen Vergleich verschiedener Algorithmen vorbestimmt sind.
Die zweite Etappe stellt die Durchführung der aktiven experimentalen Forschungen der Realisierung des Hardwaresystems dar. Die im Simulieren der Autosbewegung besteht, dabei muss man eine Reihe der Kriterien, als auch im Fall mit der Algorithmusprüfung erfüllen. Es ist nötig zu bemerken, dass für die Durchführung der ähnlichen Forschungen das ein spezieller Dienstraum notwendig ist, in dem die Bewegung des Autos, die Zeichen des Straßenverkehrs, und ebenso verschiedene Wetterbedingungen vorgetäuscht werden.
Die dritte Etappe ist die Prüfung des Systems in den realen Bedingungen im Verlauf des aktiven Experimentes. Sie soll auf dem speziell vorbereiteten Platz mit den bestimmten Zeichen des Straßenverkehrs, und ebenso mit verschiedenen Schildern, unter den Bedingungen der Autosbewegung mit verschiedenen Geschwindigketscharakteristiken durchgeführt werden.
Die vierte Etappe besteht in der Durchführung der passiven Forschung des Arbeitssystems infolge der Autosbewegung nach den öffentlichen Straßen [4]. Die Realisierung dieser Etappe besteht ebenso in vielen Etappen, abhängende von den Wetterbedingungen.
Die Durchführung jeder Etappe des Experimentes muss einer ganzen Reihe der Kriterien befriedigen, die Qualität des Systems in verschiedenen Bedingungen, und zwar das Simulieren verschiedener Bedingungen bewerten zulassen werden. Man kann sie bedingt auf einige Gruppen teilen.
Die erste Gruppe meint in sich das Simulieren verschiedener Naturbedingungen:
1. Nach der Tageszeit — Tag, Nacht, Dämmerung.
2. In verschiedenen Wetterbedingungen:
2.1. wolkenlos, wenigbewölkt, die hohe Bewölkung, trüb;
2.2. Regen, stürmischer Regen, Gewitter, Nieseln, Nebel, Schnee, stürmischer Schnee, Regen mit Schnee
Die zweite Gruppe der Bedingungen meint in sich das Simulieren verschiedener Bedingungen der Beleuchtungsstärke: die natürliche Beleuchtung; die unechte Beleuchtung, sowohl in der Licht der Scheinwerfer, als auch infolge der Straßenbeleuchtung; das Simulieren der Verblendung des Systems, infolge der geraden Beleuchtung vom Licht des gegenkommenden Autos.
Die dritte Gruppe der Bedingungen ist die Basis der Schilder der Straße entlang, bei der Bildung der ähnlichen Basis ist es nötig einige Kriterien zu berücksichtigen.
1. Die Zeichen des Straßenverkehrs (sowohl vom System erkennbare, als auch nicht erkennbare), das Beispiel ist auf der Zeichnung 1c.
2. Die Zeichen des Straßenverkehrs mit der Überdeckung seines Teiles (zum Beispiel, durch die Blätter der Bäume).
3. Die Werbeschautafeln ähnlichen den Zeichen des Straßenverkehrs nach der Form und der Farbe, zum Beispiel «Vorsichtig! Eichhörnchen!" auf der Zeichnung 1а.
4. Die unstandardmässigen und vorübergehenden Zeichen, das Beispiel auf den Zeichnungen 1b und 1c

Die Zeichnung 1. die Bilder aus den Prüfungsvideoaufzeichnungen der verschiedenen enthaltenden Verkehrszeichen.
a) — das Schild ist nicht Zeichen des Straßenverkehrs; b) — unstandardmäßiges Zeichen auf dem Auto; c) — das Bild enthält die vorübergehenden und ständigen Zeichen des Straßenverkehrs.
Die vierte Gruppe meint die Bedingungen, die für die Prüfung der Handlungzone des Systems notwendig sind, für die termingemäße des Fahrersreaktion oder der elektronischen Helfer bei der Bewegung, das heißt die Entfernung bis zum Zeichen, auf dem das System das vorliegende Zeichen des Straßenverkehrs bestimmen muss. Es ist nötig zu bemerken, dass die Kriterien der vorliegenden Gruppe vor allem auf der Sicherheit des Straßenverkehrs gegründet sein müssen, also muss man aus den Forderungen zur Bewegung für jedes Land abgesondert, und ebenso verhältnismäßig unmittelbar die Modelle des Autos ausgehen. So ist für die Russische Föderation, laut GOST R im Punkt 5.1. muss Die Entfernung des Zeichenssichtes nicht weniger als 100 m [1] sein, laut der Straßenverkehrsregeln müssen die Zeichen des Straßenverkehrs vor dem Hindernis in der Stadt 50–150 m, auf den Fernstraßen 150–300 m [2, 3] sein, daraus kann man feststellen, dass das System das Zeichen in den städtischen Bedingungen ebenso nicht weniger als 50 m, und auf den internationalen Straßen nicht weniger als 100 m «sehen» muss.
Eigentlich sagend, muss die notwendige Entfernung bis zum Zeichen, auf dem das System reagieren muss nicht weniger Bremsweg des Autosweges sein, das heißt, ist die Entfernung für das volle Anhalten des Autos unter Berücksichtigung der Fahrersreaktion notwendig, und erwünscht seit Moment des Erscheinens des Straßenverkehrszeichens. Auf der horizontalen Oberfläche kann man es nach der Formel 1 [6] rechnen.
 (1)
(1)
Wo, v — Geschwindigkeit des Autosbewegung in m/S, g — die Beschleunigung des freien Fallens gleich 9,8 m/s2, µ — Koeffizient der Reibung, t — die Zeit der Fahrersreaktion.
Bei der Berechnung ist es nötig zu berücksichtigen, dass die Zeit der Fahrersreaktion individuell für jeden ist, und sich in den Grenzen von 0,4 bis zu 1,6 Sekunden ändert, hängt von seinen psychophysiologischen Besonderheiten, Zustandes, Erfahrung, der Komplexität der Fahrlage und anderer Faktoren ab. Von den zahlreichen Forschungen ausgehend, ist es üblich zu meinen, dass die mittlere Zeit der Fahrersreaktion ungefähr 1 Sekunde ist. Der Reibungkoeffizient hängt von der Masse des Autos, des Typs der Straßendeckung, der Reifen, des Bremssystems und einer Menge anderer Faktoren ab, kann man die genäherten Daten ohne Rucksicht auf die konstruktiven Besonderheiten des Mantels und der Masse des Autos verwenden. Die Abhängigkeit des Bremsweges vom Koeffizienten der Reibung ist auf der Zeichnung 2 dargestellt.
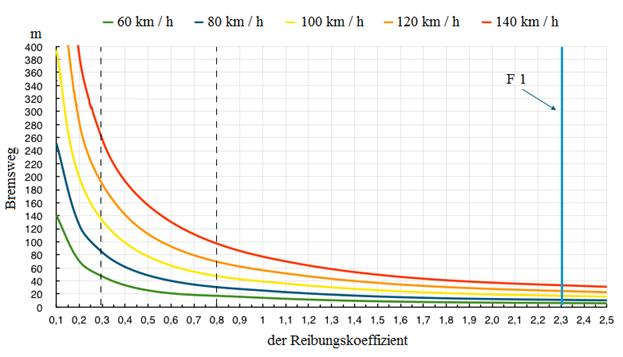 Die Zeichnung 2. die Abhängigkeit des Bremsweges vom Reibungkoeffizienten zwischen dem Mantel und dem Asphalt bei verschiedenen Anfangsgeschwindigkeiten ohne Rucksicht auf die konstruktiven Besonderheiten des Mantels und der Masse des Autos
Die Zeichnung 2. die Abhängigkeit des Bremsweges vom Reibungkoeffizienten zwischen dem Mantel und dem Asphalt bei verschiedenen Anfangsgeschwindigkeiten ohne Rucksicht auf die konstruktiven Besonderheiten des Mantels und der Masse des Autos
Aus der graphischen Darstellung ist es sichtbar, dass auf den rutschigen Oberflächen (Eis, Schnee, nasser Grund) die Qualität des Gummis nicht wesentlich ist und nur mit der Reibung kann man das Auto auf dem Eis nicht anhalten. Man muss andere Prinzipien verwenden: die Laufdecke, die sich an die Unebenheit der Deckung klammert, Grundstoßen, die Ketten oder die Dornen, haftend ins Eis. Das Abschnitt mit dem Koeffizienten der Reibung bis zu 0.8 charakterisiert ungefähr das Verhalten des gewöhnlichen Autos auf dem Asphalt. Für den Vergleich sind die Kennziffern des Boliden der Formel 1 [7] angeführt.
So ist es bei der Berechnung nötig, die maximalen Schnellcharakteristiken zu bestimmen. Für Russland ist es 60 Kilometer je Stunde bei der Bewegung in der Stadt, 90 Kilometer je Stunde, bei der Bewegung nach den Fernstraßen und 130 Kilometer je Stunde bei der Bewegung nach den Autobahnen.
Die fünfte Gruppe der Kriterien muss die Möglichkeit der Veränderung des Profils der Straße, und zwar die Abstiege und die Aufstiege berücksichtigen. In diesem Fall ist es nötig, ebenso den Winkel der Neigung der Straße zu berücksichtigen.
Die Kombination der Kriterien lassen, die Qualität der Systemsarbeit sowohl in verschiedenen Bedingungen von idealen, als auch äußerst komplizierten bestimmen, und entsprechend, die Wahrscheinlichkeit des Verbleibs und der Erkennung der Straßenverkehrszeichen, im Verlauf einer Menge der Experimente bestimmen. Die Durchführung der Prüfung der ähnlichen Art der Systeme muss ebenso die regionalen Besonderheiten berücksichtigen, ausgehend von den staatlichen Standards an die Zeichen des Straßenverkehrs und die Bedingungen ihrer Anlage jedes abgesonderten Landes, und ebenso die gebietsmäßigen Koeffizienten der Naturbedingungen. Es ist nötig die Zone des Systemsgang abgesondert für jedes Modell des Autos zu bestimmen. Nichtsdestoweniger, ungeachtet der Notwendigkeit einer ganzen Reihe der individuellen Forschungen ist der Algorithmus ihrer Durchführung insgesamt ähnlich.
Im Verlauf der durchgeführten Forschungen ist der Algorithmus der Prüfung der automatisierten Systeme der Erkennung von Verkehrszeichen für die Sicherung des Straßenverkehrs entwickelt. Die Kriterien, die das System der Erkennung der Straßenverkehrszeichen vollkommen prüfen zulassen, sind bestimmt. Ebenso sind die Bedingungen der individuellen Charakteristiken des Systems je nach dem Land, und ebenso der Marke und dem Modell des Autos bestimmt, die Begründung der Gründe des Erscheinens solcher Charakteristiken und ihre Abhängigkeit vom Bremsweg des Autos ist gegeben. Es sind die Kriterien der sicheren Arbeit der ähnlichen Systeme in Russland bestimmt.
References:
1. GOST R 52289–2004 Теchnitscheskije sredstwa оrganisazii dorozhnogo dwizhenija. Pravila primenenija dorozhnih znakow, razmetki, svetoforow, doroznih ograzdeniy I napravljautschih ustroystw
2. GOST R 52290–2004 Теchnitscheskije sredstwa оrganisazii dorozhnogo dwizhenija. Snaki dorozhnye.
3. Pravila doroznogo dvizhenia
4. Mileshkin Kirill, Satschkov Maksim — Proverjaem sistemi raspozhnavanija znakow w dele [elektronische Quellen] URL: http://www.zr.ru/content/articles/444117-proverajem_sistemy_raspoznavanija_znakov_v_dele/ (Die Datum der Anrede 15.05.2015).
5. Semenischtschew E. A., Kutsowa E. L., Fetisow N. G. Der Algorithmus der Suche und der Erkennung von Verkehrszeichen nach der Analyse der Videoreihenfolge. Kazan. Pereoditscheskoe uzdanie «Molodoy utschenyi». № 6 2015 г.— С. 214–218.
6. Tormoznoy put [elektronische Quellen] URL: https://ru.wikipedia.org/wiki/ %D2 %EE %F0 %EC %EE %E7 %ED %EE %E9_ %EF %F3 %F2 %FC (Die Datum der Anrede 15.05.2015).
7. SaltLake — Tormozhenie [elektronische Quellen] URL: http://autokadabra.ru/shouts/75884/ (Die Datum der Anrede 15.05.2015)
