





Трехмерное сканирование – процесс автоматизированного создания математических моделей реальных объектов, то есть создание их трехмерных виртуальных моделей. Наиболее удобным, точным и быстрым способом трехмерного сканирования является бесконтактное лазерное трехмерное сканирование. Обычно трехмерное сканирование применяется в тех случаях, когда создание трехмерной модели с помощью операций моделирования в графических редакторах невозможно, либо затруднительно, либо не целесообразно, исходя из назначения модели.
Большинство триангуляционных лазерных трехмерных сканеров имеют встроенные алгоритмы преобразования данных в облако точек, которые в свою очередь, обрабатываются уже на компьютере в специализированных программах, таких как AutoCAD, 3D Max и тому подобных. Данная технология требует высоких производительных мощностей, расположенных в самом устройстве, следовательно, и цена такого устройства будет высока.
Плюсы данной технологии: встроенная обработка данных; алгоритмы настроены на конкретные технические параметры устройства.
Минусы: относительно большой вес установки из-за встроенного вычислительного оборудования; высокая цена;
Существует реализация, учитывающая минусы предыдущего способа. David LaserScanner - программное обеспечение, которое дает возможность выполнять трехмерное сканирование объектов и преобразовывать полученный результат в модели, которые можно импортировать в 3D-редакторы. Для работы с программой необходим компьютер, подключенная к нему камера (подойдет веб-камера) и лазерный уровень.
Плюсы: малый вес; цена ниже, чем у предыдущего способа.
Минусы: низкий уровень мобильности, система представляет собой набор инструментов; для сканирования требуется специальный шаблон; сканирование объектов, ограниченных по размеру.
Еще одна реализация – устройство с камерой и лазером, которые разнесены на определенное расстояние (базис). При сканировании объекта с камеры записывается массив изображений на внешнее запоминающее устройство. Записанные данные преобразуются с помощью специальной программы в массив трехмерных точек.
Плюсы: исключены все минусы предыдущих способов, в данной работе будет рассмотрен именно этот тип реализации.
Этапы получения пространственных данных:
- добавление каждого кадра из видеофайла в список;
- поиск на каждом кадре нужных линий (проекция лазерного луча).
Главным образом, необходимо разработать методы преобразования исходных данных в массив точек, пригодный для отображения на экране, редактирования и сохранения на диск компьютера. Исходные данные представляют собой последовательность массивов размером m x n. Элемент X[m][n] состоит из трех значений: уровень красного цвета, уровень зеленого цвета, уровень синего цвета.
Блок-схема алгоритма представлена на рисунке 1. Продолжение алгоритма преобразования представлено на рисунке 2.
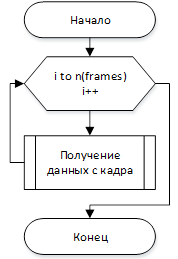
Рис. 1. Блок-схема алгоритма преобразования
Главной задачей данного метода является нахождение в столбце m такого значения n, которое удовлетворяет условиям сравнения значений его компонентов с заранее заданными данными. Например, если цвет луча сканирующего устройства красный, то n будет такое, в котором уровень красного цвета максимальный, а уровни зеленого и синего цвета равны нулю. Это идеальный случай, когда в массиве не присутствует других уровней цветов, кроме сравниваемого цвета, а также найденный элемент n единственный в столбце.
На практике дело обстоит совсем иначе. При сравнении появляются элементы с ненулевыми уровнями всех цветов, а также, количество этих элементов может быть больше одного.
Чтобы алгоритм сравнения работал без проблем, можно ввести в него следующие поправки: ввести определение «Порог сравнения по цвету» - сравнение будет происходить только в том случае, когда значение уровня цвета выше указанного порога; также после каждого сравнения производить усреднение – если получено несколько значений n, то берем их среднее значение.
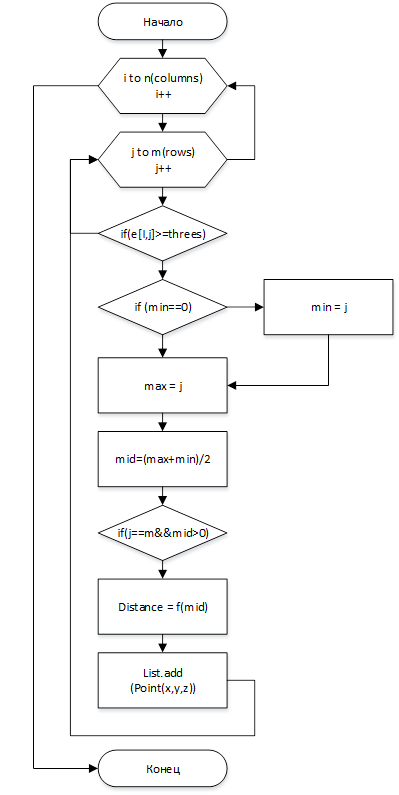
Рисунок 2. Блок-схема продолжения алгоритма преобразования
Литература:
1. Порев В. Н. Компьютерная графика – СПБ.: Изд-во БХВ – Петербург, 2002. - 432 c.
2. Л. Аммерал Принципы программирования в машинной графике. Пер. с англ. – М.: “Сол Систем”, 1992. – 224 с.
3. Жарков В. А. Жарков - Компьютерная графика, мультимедиа и игры на Visual C# 2005. – Москва: Жарков Пресс, 2005. – 812 с.
4. Р.А. Алешко, А.Т. Гурьев, К.В. Шошина, В.С. Щеников Разработка методики визуализации и обработки геопространственных данных // Научная визуализация. – 2015. - №1. – С. 20 – 29.
5. Алешко Р.А. Система мониторинга и управления пространственными гетерогенными объектами (на примере Соловецкого архипелага) / Бекмешев А.Ю., Васендина И.С., Гурьев А.Т., Карлова Т.В., Шошина К.В., Щеников В.С. // Вестник БГТУ. - 2014. - №3(43). - С.104-108.
6. Гурьев А.Т. Разработка геоинформационной системы на базе программного обеспечения с открытым исходным кодом / Алешко Р.А., Васендина И.С., Шошина К.В., Щеников В.С. // Вестник БГТУ. - 2014. - №3(43). - С.114-118.
7. Алешко Р.А., Гурьев А.Т. Структурное моделирование взаимосвязей дешифровочных признаков спутниковых снимков и таксационных параметров лесных насаждений // Труды СПИИРАН. Вып. 29 (2013). С. 180–189.
8. Алешко Р.А., Гурьев А.Т. Методика тематического дешифрирования спутниковых снимков лесных территорий на основе структурных моделей // Известия Вузов. Приборостроение. 2013. Т.56. №7. С. 76–77.
