





Ключевые слова: робот, манипулятор, увлажнитель, подвижность.
Keywords: robot, manipulator, humidifier, mobility.
Обеспечение комфортного микроклимата в заводских и бытовых помещениях требует поддержания в них относительной влажности воздуха в соответствии с санитарными нормами. Роботизированный пылесос, который был разработан нами ранее, усложнили путем добавления дополнительного устройства. Функциональность робота-пылесоса увеличивается за счет ультразвукового увлажнителя воздуха, который служит для повышения очистки воздуха в заводском или бытовом помещении. В устройство увлажнителя воздуха входят платы питания и генерации ультразвуковой частоты. Плата питания формирует напряжения для питания активных элементов усилителя с положительной обратной связью. За счет этого каскад начинает генерировать колебания. Данные колебания, при достаточной мощности будут разбивать воду на мельчайшие капельки. Практика эксплуатации и проектирования робота-пылесоса показала необходимость средств анализа передвижения автономного транспортного средства. Желаемая траектория движения задается в координатной системе задания путем указания требуемых положений рабочего органа и его ориентации. При управлении неизбыточными роботами такая траектория обычно преобразуется в пространство обобщенных координат и полученные желаемые траектории движения в степенях подвижности робота отрабатываются независимыми следящими системами. Во многих практических ситуациях, связанных с работой в сложных загроможденных средах, находят применение манипуляторы с кинематической избыточностью. В этом случае не существует однозначного преобразования из пространства задания в пространство обобщенных координат. Существующие подходы к формированию траекторий избыточных манипуляторов достаточно сложны и, как правило, не учитывают реальных динамических характеристик манипуляторов. Ниже рассматривается задача управления движением одного класса избыточных манипуляционных систем, представляющих собой быстрый малый неизбыточный манипулятор, установленный на медленной позиционирующей руке больших размеров (см.рис.1).
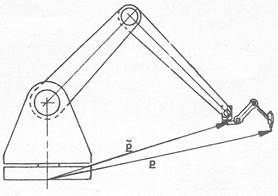
Рис. 1. Неизбыточный манипулятор, установленный на платформе робота-пылесоса
Задача управления избыточной манипуляционной системой по заданной в пространстве задания траектории разделена на две подзадачи: кинематическую, связанную с формированием желаемых траекторий в степенях подвижности манипулятора с исключением вырождения системы и «потери» степеней свободы, и задачу отслеживания заданной траектории. Конфигурация манипуляционной системы, показанной на рис.1, определена векторами р и p1 в неподвижной системе координат. Вводится в рассмотрение расширенный вектор положения системы в координатной системе задания рa= [p p1], dim(рa)=n, где n — число степеней подвижности избыточной манипуляционной системы. Когда задано желаемое положение рабочего органа рref, можно из кинематических соображений выбрать pref1 таким образом, чтобы неизбыточный малый манипулятор находился в положении, близком к центру его рабочего пространства. Если позиционирующая часть избыточной манипуляционной системы имеет три степени подвижности и используется для того, чтобы обеспечить основанию малого манипулятора три поступательные степени свободы, вектор pref можно выбрать в соответствии с выражением рref1=dref-d0 [1]. Таким образом, по заданному изменению рref можно сформировать эталонную траекторию qref, которая должна быть отработана следящей системой. Однако при управлении движением рассматриваемого классом манипуляционных систем по заданной траектории возникает ряд проблем. Для того чтобы позиционирование осуществлялось точно, необходимо, чтобы координаты qi, i=1,...,n были достаточно близки к соответствующим значениям qi, ref. Это означает, что в тех случаях, когда позиционирующая рука манипуляционной системы является большой и медленной, а манипулятор — малым и быстрым, инерционная позиционирующая часть ограничивает полосу пропускания всей системы. Кроме того, такой метод управления требует значительных величин моментов в степенях подвижности. Ниже предлагается подход, позволяющий обеспечить точную отработку pref при меньшей точности движения позиционирующей руки [2]. При этом высокочастотная составляющая задания выполняется манипулятором, а низкочастотная — позиционирующей рукой. Уравнение движения n-звенного манипулятора может быть представлено в форме M(q)q”=n(q,q’)+Ту, где M(q) -матрица инерции; n(q, q’) — вектор, включающий в себя Кориолисовы центробежные члены, а также силы трения и тяжести; Т — вектор входных моментов. Взаимосвязь скорости изменения положения в пространстве задания и скорости движения в угловой системе координат представляется соотношением р’=J(q)q’, где J(q) — матрица Якоби. Описанный метод управления может быть использован для управления рассматриваемыми манипуляционными системами. Поскольку требуемая точность отслеживания желаемого положения рабочего органа должна быть выше точности отслеживания положения позиционирующей руки. В закон управления могут быть дополнительно включены программная составляющая, рассчитанная по ускорению желаемого движения Ui=Xi,ref”+gidXi+gi+n,dxi+n+KiòdXi(t)dt. Коэффициенты интегральной обратной связи выбираются из соотношения К=gi2/(5gi+n), что соответствуют взаимосвязи постоянных времени интегрирования Тi и дифференцирования Td ПИД-регулятора. Показано, что для обеспечения робастности системы существенно большее значение имеет точность вычисления матрицы инерции. Точность вычисления членов n(•; •) и MJa-1jaq мало влияние на устойчивость системы. Предложенный подход был использован для синтеза системы управления роботом-пылесосом, который предназначен для ультразвукового увлажнения воздуха. Манипуляционная система имеет девять степеней подвижности, одна из которых имеет только два фиксированных положения 0° и 180°. Система включает в себя манипулятор с шестью степенями подвижности, установленный на подвижном основании. Степени подвижности, позиционирующей руки существенно более инерционны, чем степени подвижности манипулятора. Положение рабочего органа в пространстве задания определяется вектором Р= [х,у,z,ф,q,Y]T, гдe х, у, и z определяют положение рабочего органа в координатной системе основания, а углы ф, q и Y определяют ориентацию, рабочего органа. Таким образом, разработанная конструкция робот позволяет обеспечить микроклимат в жилых и промышленных помещениях [3].
Литература:
1. Поезжаева Е. В. Промышленные роботы: учеб. пособие. в 3 ч. — М.: Изд-во УМО АМ МВТУ им. Баумана; изд-во ПГТУ, 2009
2. Зенкевич С. Л. Управление роботами — М.: Изд-во МГТУ им. Н. Э. Баумана, 2000
3. Поезжаева Е. В. Теория механизмов и механика систем машин: учебное пособие — М.: изд-во ПГТУ, 2015
