





Необходимость поддержания трубопроводов в хорошем состоянии заставляет искать новые эффективные методы контроля труб с цепью выявления дефектов и трещин, а также коррозии на их поверхности. На практике для контроля горизонтальных прямых участков труб используют ультразвуковые и магнитные методы так же существуют различные колесные роботы. Однако эти методы теряют свои достоинства и становятся малопригодными, если трубы имеют изгибы и вертикальные участки, что обусловлено трудностью прохождения контролирующего устройства через такие участки. Для решения этой проблемы мы разработали робота и предъявили к нему основные требования, которым он должен отвечать. Робот снабжен датчиком обнаружения 90-градусного изгиба, установленным на головном звене, а также датчиками скорости и пройденного пути, расположенными на двух ведущих звеньях для более лучшего позиционирования. Разработанный нами робот позволит уменьшить время диагностирования различных типов трубопроводов, а также сократить затраты на контроль состояния трубопроводов.
Ключевые слова: робот, контроль, трубопровод.
В настоящее время в России эксплуатируются устаревшие нефтегазопроводы. Так, например, по статистике «Газпром» за 2013 год, 56529 тыс. км трубопроводов эксплуатируются более 20 лет, 41703 тыс. км более 30 лет, 19701 тыс. км более 40 лет и 9861 тыс. км более 50 лет. Стоит отметить, что Россия является крупнейшим поставщиком природного газа в Европу поставляя 50 млрд. куб. м в год и во избежание финансовых потерь в случае аварии необходимо своевременно проводить ремонт трубопроводов. Ежегодно «Газпром» проводит капитальный ремонт (рис.1) отдельных участков газопроводов, этот метод ремонта с каждым годом становиться все менее эффективней, так как общая протяженность газопроводов прогрессивно увеличивается.

Рис. 1. Капитальный ремонт газопровода.
Поэтому, необходимо производить ремонт трубопроводов по их фактическому состоянию, то есть в первую очередь производиться диагностирование необходимого участка трубопровода и в случае обнаружения каких-либо дефектов, повреждений будет совершен ремонт. В последние годы все большее внимание уделяется бестраншейному методу диагностирования труб. На практике для контроля горизонтальных прямых участков труб используют ультразвуковые и магнитные методы так же существуют различные колесные роботы (рис.2). Однако эти методы оказываются малопригодными, если трубы имеют изгибы и вертикальные участки, что обусловлено трудностью прохождения контролирующего устройства через такие участки. Самым же актуальным направлением в этой области является создание змеевидных роботов.
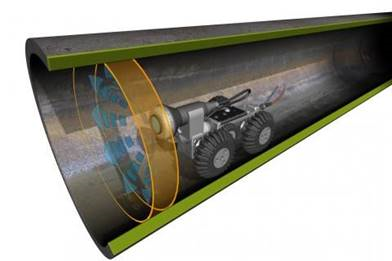
Рис. 2. Колесный робот для контроля трубопроводов. Источник: www.ds39.ru
Нами были разработаны следующие требования, которым должен отвечать робот:
1. Робот должен перемещаться по трубам и проходить 90-градусные изгибы, Т-образные сочленения, соединительные муфты.
2. Робот должен быть оборудован сенсором, обнаруживающим дефекты, причем наличие этого сенсора не должно мешать роботу перемещаться по трубам.
3. Робот должен допускать возможность введения его в трубопровод и извлечение наружу в одной и той же точке трубы, чтобы избежать необходимости раскопок грунта в нескольких местах.
4. Робот должен быть оборудован средствами регистрации пройденного расстояния и определения собственного положения; эти данные должны записываться вместе с информацией о дефектах.
По принципу передвижения внутри трубы малого диаметра инспекционные устройства можно грубо разделить на две группы: устройства с механическим движителем и системы с подачей избыточного давления (см. рис.3).
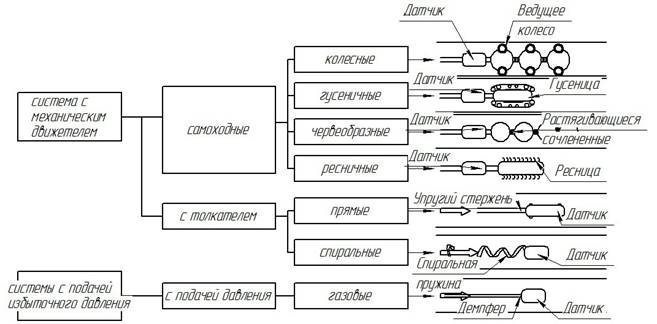
Рис. 3. Инспекционные устройства
В связи с тем, что самодвижущиеся системы могут перемещаться в автоматическом режиме и отличаются более высокой точностью позиционирования, они представляются более перспективными, чем системы с внешним движителем. Поэтому мы решили разрабатывать самодвижущийся робот. При этом были приняты во внимание следующие дополнительные достоинства этого подхода:
1. конструкция самодвижущейся системы проще и надежнее других типов систем;
2. движение возможно при любой конфигурации труб, и им легко управлять;
3. тяговое усилие можно увеличивать путем добавления ведущих звеньев, что повышает эффективность системы;
4. конфигурация с несколькими ведущими звеньями облегчает прохождение изгибов трубы.
Конструкция разработанного робота показана на рис. 4, где обозначено: 1 -головное звено; 2 — направляющее звено; 3 — ведущее звено; 4 — передающее звено; 5 — моторное звено; б — соединительное звено; 7 — сенсорное звено; 8 -.хвостовое звено; 9 — гибкое соединение. Суммарная длина робота 1880 мм. Он состоит из нескольких сферических звеньев, соединенных гибкими переходниками. Эти звенья выполняют разные функции. Так, в моторном звене установлен электродвигатель; ведущие звенья создают тяговое усилие с помощью колес, находящихся в контакте с трубой; на сенсорном звене установлен вихревой датчик дефектов.
Размер каждого звена соответствует внутреннему диаметру трубы с учетом необходимости прохождения соединительных переходников. Гибкое соединение звеньев осуществляется двумя соосными спиральными пружинами, передающими крутящий момент двигателя.
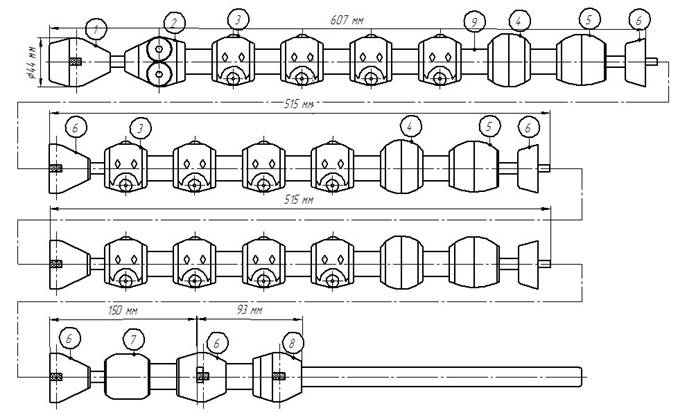
Рис. 4. Конструкция робота
Для исключения проскальзывания ведущих колес робота, необходимо обеспечить высокий коэффициент трения между этими колесами и внутренней поверхностью трубы. Для этого имеется две возможности: повышение силы давления колеса на трубу и увеличение числа колес. Недостатком первого метода является затрудненное прохождение участков со скачкообразным изменением диаметра трубы. В связи с этим был использован второй метод с большим количеством ведущих звеньев, причем их количество можно менять в зависимости от требуемой силы трения. Три ведущих звена обеспечивают тяговое усилие более 15 кг. Такой робот может производить инспекцию изогнутой трубы длиной до 50 м с четырьмя 90-градусными коленами, перемещаясь по ней со скоростью до 1 м/с. Робот снабжен датчиком обнаружения 90-градусного изгиба, установленным на головном звене, а также датчиками скорости и пройденного пути, расположенными на двух ведущих звенья для более лучшего позиционирования.
Необходимо учитывать, что трудности организации целенаправленного перемещения бесколесного змеевидного робота в большой мере были связаны с отсутствием рациональной механической модели перемещения гибкого змеевидного тела. Рассматриваемые роботы с диагностическими датчиками на борту, предназначены для движения внутри труб небольших диаметров, в диапазоне от двух миллиметров до нескольких десятков сантиметров. И для того чтобы выполнить техническую диагностику машин и агрегатов газовой и нефтехимической промышленностей, энергообъектов, проведения регламентных и ремонтных работ трубопроводов малых диаметров, а также применения в технологических процессах высокоточной обработки изделий для энергетических систем. В состав систем управления роботами для обеспечения высокоточных движений применяются датчики. Видеокамеры необходимы для получения визуальной информации о техническом состоянии внутренних поверхностей труб. В роли этих устройств можно использовать искусственные маяки. При использовании данной аппаратуры робот может попытаться самостоятельно выделить статичные элементы окружающей обстановки и выполнить привязку к ним своих координат. Минусом такой доработки является проблема нахождения ключевых объектов при изменении условий внешней среды (например, уровня освещенности). Здесь может прийти на помощь использование стереокамер — зная угол зрения каждой из них, можно вычислить расстояние до цели. Но все равно остается актуальной задача распознавания одного и того же объекта каждой камерой и последующая синхронизация их «взглядов», что роботам пока сложно делать в масштабе реального времени. Затем информация подвергается микропроцессорной обработке. В качестве диагностических устройств могут применяться микродатчики, построенные на иных принципах, например, ультразвуковые — для выявления внутренних трещин, электромагнитные и другие, реализующие методы неразрушающего контроля. [1–11]
Разработанный нами робот позволит уменьшить время диагностирования различных типов трубопроводов, а также сократить затраты на контроль состояния трубопроводов.
Литература:
1. Федотов А. Г., Поезжаева Е. В., Заглядов П. В., Безопасность труда при взаимодействии с промышленными роботами//Экология и научно-технический прогресс. Урбанистика,2014,стр. 14–15.
2. Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 3 ч./ Е. В. Поезжаева. — Пермь Изд-во Пермь.гос, тех. ун-та, 2006.- Ч.1.-64 с.
3. Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 2 ч./ Е. В. Поезжаева. — Пермь Изд-во Пермь.гос, тех. ун-та, 2006.- Ч.1.-64 с.
4. Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 1 ч./ Е. В. Поезжаева. — Пермь Изд-во Пермь.гос, тех. ун-та, 2006.- Ч.1.-64 с.
5. Зенкевич С. Л., Ющенко А:.С. Управление роботами.- М.:Изд-во МГОУ им. Н. Э. Баумана, 2006.
6. Корендясев А. И. Теоретические основы робототехники: в 2 кн./ А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес; отв. Ред. С. М. Каплунов.– М.:Наука,2006.
7. Хорн Б. К. Зрение роботов.– М.:Мир,1989.
8. Михайлов С. В., Романов В. В., Заикин Д. А., Система технического зрения для диагностики процесса резания материалов//Вестник компьютерных и информационных технологий.,2007,№ 4,стр 23–26
9. Роботизация фермерских хозяйств по обработке растений. Поезжаева Е. В., Васенин А. С., Шумков А. Г. Вестник ВСГУТУ. 2014. № 3 (48). С. 59–62.
10. Робот для тушения отдельных очагов пожара. Поезжаева Е. В., Федотов А. Г., Заглядов П. В. Молодой ученый. 2014. № 16. С. 399–401.
11. Робот-змея для технической диагностики и ремонта трубопроводов. Поезжаева Е. В., Юшков В. С. Новые материалы и технологии в машиностроении. 2011. № 14. С. 93–98.
