





Введение. В процессе движения той или иной железнодорожной единицы под постоянным контролем должны находиться важные для качественного управления последним параметры, к которым, в частности, относятся скорость движения, характеристики колебательных перемещений, расстояние до некоторого объекта, координаты «дальность — пространственный угол» элементов объекта.
Одним из перспективных методов измерения всех этих параметров является радиолокационный метод, в основу которого положен эффект Доплера.
Особенности радиолокационных измерений параметров железнодорожных объектов заключаются, в первую очередь, в необходимости встречной или встречно-боковой (передней или передне-боковой, в случае расположения антенны на подвижной единице) ориентации приемо-передающей антенны по отношению к облучаемому объекту. Во-вторых, для железнодорожного транспорта характерны относительно небольшие скорости движения (по сравнению с воздушным транспортом). Для Российских железных дорог диапазон реализуемых скоростей поездов составляет от 0 до 250 км/ч — для высокоскоростных пассажирских поездов, от 0 до 100 км/ч — для грузовых поездов [1]. И, в-третьих, малые дальности измерений. Облучаемый объект при этом является пространственно протяженным.
В случае, когда необходимо вычислить координаты: скорость, дальность, пространственный угол, целесообразно использовать режим доплеровского обужения луча (ДОЛ), заключающийся в дальномерно-доплеровской обработке [2] отраженного от цели сигнала. Более простой в реализации по сравнению с режимом ДОЛ — режим реального луча. Однако он применим лишь в тех случаях измерения дальности до объекта, когда отсутствует необходимость разрешения по углу относительно основного направления излучения. В этом режиме разрешение по углу оказывается равным эффективной ширине диаграммы направленности антенны (ДНА), что недостаточно для различения малоразмерных элементов на облучаемой поверхности. Последнее необходимо и в случае облучения поверхности движущегося вагона, когда измеритель установлен стационарно вблизи железнодорожного пути, в связи с конструкционными особенностями вагонов различного типа, и в случае облучения железнодорожного полотна, балласта пути, когда измеритель расположен на подвижной единице, в связи с конструкцией элементов верхнего строения пути и напольного оборудования в исследуемой зоне. Приемник в этом случае получает отраженный сигнал в виде совокупности лучей с разным параметром, определяющим дальность, в зависимости от метода измерения. В общем случае, результирующая наклонная дальность определяется как средняя, что влечет за собой соответствующие погрешности измерений. К тому же, зачастую требуется определить зависимость между дальностью и углом положения относительно вектора скорости, то есть вычислить матрицу, i,j-e элементы которой представляют амплитуду сигнала, зафиксированного в i-м элементе разрешения по дальности для j-го фильтра частот (то есть для определенного угла положения). Решением данной задачи и является использование Доплеровского обужения луча.
Цель статьи: рассмотрение некоторых вопросов дальномерно-доплеровской обработки отраженных от объектов железнодорожного транспорта и инфраструктуры радиолокационных сигналов.
1. Дальномерно-доплеровская обработка отраженного сигнала.
Если излучаемый радиолокационный сигнал является непрерывным немодулированным, то принимаемый отраженный сигнал k-ого отражателя представляет собой гармоническое колебание, модулированное по амплитуде и фазе. Модуляция параметров сигнала возникает при его распространении и переотражении. Для k -ого точечного элемента объекта принимаемый сигнал (без учета фазовых искажений) можно представить в виде
Uk (t)=ε0 ε(t)Uk cos [ω0(t-τr(t))+ φот(t)], (1)
где ε0 — коэффициент ослабления сигнала, учитывающий изменение его интенсивности при распространении и отражении; ε(t) — коэффициент, учитывающий случайную флуктуацию интенсивности отраженного сигнала; τr(t)=2r(t)/c — время запаздывания параметров отраженного сигнала; φот(t) — случайная начальная фаза отраженного сигнала, включающая начальную фазу передаваемого сигнала и ее изменения в процессе распространения и отражения сигнала; r(t)– расстояние до объекта в данный момент времени; с — скорость распространения электромагнитных волн; Uk — случайная амплитуда сигнала.
Фазовый сдвиг сигнала зависит от расстояния до отражающей поверхности r(t)
φ(t)=ω0τr(t)=4πf0 r(t)/с=4π r(t)/λ. (2)
В экспоненциальном виде выражение (1) можно записать как:
Uk (t)=ε0 ε(t)Uk exp{-j [4π r(t)/λ — φот(t)]}. (3)
Разложив r(t) в ряд, получим
r(t)=r0k-(Vcosαk) t+(V2sin2αk)t2/2r0k+…, (4)
где r0k — наклонная дальность до k-ого отражателя в начальный момент времени; V — скорость подвижного железнодорожного объекта; αk — угол отклонения луча k-ого отражателя от вектора скорости движения объекта.
При этом r'(t) характеризует скорость движения объекта, r'' (t) — его ускорение.
Подставив выражение (4) в (2) и, учитывая только первые три члена разложения в ряд, получим выражение для полной фазы сигнала
φk(t)= -(4π/λ) r0k+(4π/λ)(Vcosαk) t-(4π/2r0k λ)(V2sin2αk) t2+ φот(t)=
=(4π/λ)(Vcosαk)t-(2π/λr0k)(V2sin2αk)t2+(φот(t)-(4π/λ)r0k). (5)
При этом доплеровская частота
Fд=(2/λ)(Vcosαk)-(2/λr0k)(V2sin2αk) t. (6)
Для того чтобы второе слагаемое выражения (6) не влияло на доплеровскую частоту в режиме ДОЛ ограничивается интервал синтезирования [3]
Тс≤ , (7)
, (7)
следовательно, ограничивается и угловая разрешающая способность по углу αk.
Тогда разрешающая способность по частоте
δf=1/Тс. (8)
Поскольку для железнодорожного транспорта измеряемые дальности малы, скорость движения ограничена, то интервал синтезирования должен принимать сравнительно небольшие значения. Так, для измерения параметров движения подвижной единицы, скорость которой равна 100 км/ч, при установке антенны на расстоянии 3100мм (предел габарита приближения строений) от облучаемой поверхности, длине волны, равной 1,25 см, α=45°, интервал синтезирования должен быть не более 7 мс, минимальный интервал разрешения по частоте — 142 Гц.
2. Разрешение по углу положения цели относительно вектора скорости.
Доплеровские фильтры настроены на частоту
fj=jδf, (9)
где j= , n — число фильтров.
, n — число фильтров.
Максимального значения FД, согласно (6) достигает при cosαk=1, тогда
Fд макс=2V/λ. (10)
Элементы цели, расположенные на углах ±αk относительно вектора скорости подвижного объекта, имеют одинаковую доплеровскую частоту, поскольку cos(-αk)= cosαk, следовательно, отраженный от них сигнал попадает в один доплеровский фильтр. Для отображения спектров частотных фильтров относительно нулевой частоты, найдем разность опорной частоты [4] и доплеровской частоты принятого сигнала. Пусть опорный сигнал имеет частоту Fд макс. Тогда разностная частота принимаемого сигнала
Δfj=2V/λ-2Vcosαj/λ=(2V/λ)(1-cosαj)=4Vsin2(αj/2)/λ. (11)
Δfj→0 при αj→0. При этом sin(αj/2)≈ αj/2. Поэтому Δfj≈Vα2j/λ,
αj=  . (12)
. (12)
Поскольку рассматривается положительная полуось частот, в которых работают доплеровские фильтры, то разрешение по углу αj в направлении, близком к вектору скорости подвижного объекта, запишем для половины угла α0.
δ(α0/2)=  . Тогда δ(α0)= 2=
. Тогда δ(α0)= 2= . (13)
. (13)
Для последующих j фильтров угол αj отличен от нуля. Разрешение по углу αj запишется как [5]
δ(αj)=  . (14)
. (14)
Для различения сигналов, принятых от элементов цели, расположенных на углах ±αk, возможно использование суммарно-разностной антенны или антенны со специальной диаграммой направленности [6].
Поскольку выражение (6) при V=const содержит информацию о угле αj, а в некоторых случаях требуется определить угол отклонения k-ого отражателя относительно направления вектора скорости объекта в горизонтальной плоскости βk, то нужно определить зависимость углов αkи βk. Для этого рассмотрим случай облучения антенной с веерной диаграммой направленности, расположенной на движущемся со скоростью V объекте, неподвижного основания (рис. 1, а). При этом вектор скорости подвижной единицы направлен параллельно основанию, основной угол между вектором скорости и направлением излучения равен α. Угол облучения поверхности относительно основного направления излучения — βk. Зависимость угла между вектором скорости объекта и направлением луча к k-ому отражателю αk от углов α и βk, в общем случае будет нелинейной, найти ее можно решением системы из трех уравнений (рис. 1, б)
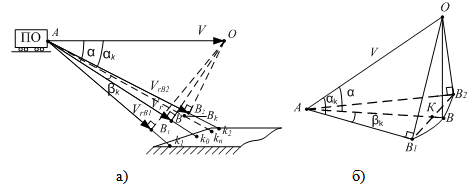
Рис.1. а) К пояснению различия лучевых относительных скоростей; б) К расчету тригонометрических соотношений
 , (15)
, (15)
где 
Выводы. Использование дальномерно-доплеровской обработки радиолокационных сигналов позволяет получить отметку цели — элемента облучаемого железнодорожного объекта, в трех координатах: скорость, дальность, пространственный угол. Потенциально достижимая точность определения последних зависит от длительности строба дальномерной обработки и ширины полосы доплеровской обработки. При этом особенности радиолокационных измерений на железнодорожном транспорте накладывают ограничения на интервал синтезирования и угловую разрешающую способность.
Литература:
1. Правила технической эксплуатации железных дорог Российской федерации: утв. Приказом Минтранса России от 21.12.2010г. N286. — М.: ООО «Трансинфо ЛТД», 2011. — 256 с.
2. Марюхненко В. С. Информационный анализ навигационного обеспечения управляющих систем подвижных транспортных объектов: монография; — Иркутск: изд–во ИрГУПС, 2009. — 112 с.
3. Витязев В. В., Колодько Г. Н., Витязев С. В. Способы и алгоритмы формирования радиолокационного изображения в режиме доплеровского обужения луча // Цифровая обработка сигналов. — М.: Научный центр МТУСИ. — 2006. — № 3. — с.31–41.
4. Ефимов К. Л., Жукова И. Н., Харечкин А. С. Применение сложных сигналов с псевдослучайным законом амплитудно-фазовой манипуляции в РЛС обзора земной поверхности // Вестник Новгородского государственного университета. — Н. Новгород: Новгородский государственный университет. — 2013. — № 75 Т.1. — с.75–79.
5. Кондратенков Г. С., Фролов А. Ю. Радиовидение в передней зоне обзора бортовой радиолокационной станции с синтезированной апертурой антенны // Радиотехника. — М.: «Радиотехника». — 2004. — № 1. — с.47–49.
6. Орлов М. С. Авиационная радиолокационная станция с синтезированной апертурой антенны и передним обзором земной поверхности. — Радиотехника. — 2003, № 1
