





Проведен обзор конструкций шагающих роботов. Отмечены отличительные особенности шагающих машин и их преимущество перед колесными и гусеничными машинами. Рассмотрена область применения и функциональные возможности представленных конструкций. Отмечена главенствующая роль системы управления, определяющей возможности шагающих машин. Предложена децентрализация системы обеспечения устойчивости и движения.
Ключевые слова: мобильные роботы, шагающие роботы, система управления шагающего робота.
В настоящее время практически во всех промышленно развитых странах интенсивно ведутся работы по созданию и исследованию шагающих роботов. Это вызвано тем, что шагающие машины по сравнению с традиционными колёсными и гусеничными машинами имеют ряд преимуществ перед традиционными транспортными средствами при движении по поверхности со сложным рельефом, такими как пресечённая местность, завалы, а также внутри зданий и сооружений, где необходимо перемещаться по лестницам и узким коридорам и шахтам.
В случаях, когда желательно или необходимо, чтобы след от опор целевой мобильной платформы имел дискретный характер, достойную замену шагающей машине найти невозможно. В ней используются, заложенные в принципе шагания, возможности развязки движения корпуса машины от опорной поверхности, что уменьшает губительное воздействие на плодородный слой земли при движении. Эти особенности машины с шаговым движителем могут быть востребованы при создании сельскохозяйственных роботов.
Такие страны как США, Голландия, Швеция и другие начинают полностью переходить к безлюдному автоматизированному сельскохозяйственному производству. Внедрение роботов в эту индустрию позволит существенно повысить продуктивность и рентабельность сельского хозяйства, поэтому необходимость исследования в этой области, разработка методик построения универсальных робототехнических систем очевидны.
Современный уровень технологии и вычислительной техники позволяет строить не только лабораторные макеты, но и крупномасштабные машины, которые могут служить прототипами шагающих машин для выполнения конкретных действий на сложной местности. Ниже рассмотрены некоторые существующие разработки шагающих машин.
Обзор шагающих роботов
Особенности конструкции HexCrawler (рис.1), позволяют ему передвигаться по неровной поверхности. Корпус робота выполнен из алюминия. Привод осуществляется с помощью 12 сервомоторов, позволяющих ему развивать большую скорость. Имеет 3 группы конечностей. Каждая группа состоит из 2-х конечностей. Одна группа выполняет только опорную функцию. Две остальные используют для обеспечения движения. Каждая из этих групп приводится в движения одним сервоприводом. Кинематика робота сильно упрощена, так же как и система управления, обеспечения движения. Вследствие чего снижена маневренность, требования к качеству поверхности, наоборот, повышены.
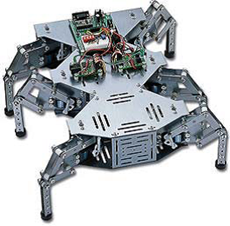
Рис. 1. HexCrawler
Mini Hexapod — автономный робот (рис.2) двигается прямолинейно, до тех пор, пока не сталкивается с каким-либо препятствием. Он оборудован двумя датчиками — “усами”. Если один из усов соприкасается с препятствием, робот поворачивается.
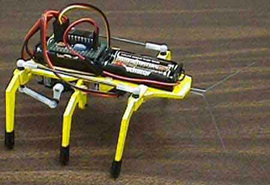
Рис.2 Mini Hexapod
Walking forest machine (рис.3) разрабатывалась как средство передвижения по пересеченной местности с минимальным пагубным влиянием на опорную поверхность (по сравнению с колесным и гусеничным транспортом). WFM обладает высокой манёвренностью. В зависимости от неровностей ландшафта, оператор может изменить высоту машины и высоту каждого шага, однако решения по выбору маршрута, регулировке высоты шага принимает оператор-водитель.

Рис. 3. Walking forest machine
Многие изобретения в области робототехнике находят свое применение в медицине. В Японии создан Medical robot (рис.4) — двуногий шагающий робот, специально приспособленный к переноске людей. Его создатели утверждают, что с помощью робота инвалиды смогут передвигаться по лестницам или по неровной поверхности.

Рис. 4. Medical robot
Фирма Boston Dynamics разработала четвероногого робота Big Dog (рис.5), который должен стать спутником солдата в самых сложных природно-климатических условиях. Благодаря разработанной системе управления, обладает высокой устойчивостью при движении по неровной, скользкой поверхностям и способен удержать равновесие даже при внешнем механическом воздействии. Робот может работать в нескольких режимах: перемещение по координатам, следовании за лидером. Может передвигаться галопом, бегом, ползком. Он снабжен двигателем и спецсредствами, обеспечивающими её управление, передвижение, ориентацию на местности и связь. В качестве источника энергии для Big Dog используется двухтактный двигатель внутреннего сгорания с водяным охлаждением мощностью в 15 л.с. Силовую установку, разработчики планируют заменить на менее шумную.

Рис. 5. Робот Big Dog
Ranger — шагающий робот-марафонец (рис.6), сделанный в Корнельском университете (Cornell University). На сегодняшний день он поставил рекорд по работе на дистанции без перезарядки и ремонта. Обогнал своего конкурента робота BigDog.

Рис. 6. Ranger
Известная американская робототехническая компания Boston Dynamics представила робота Cheetah («Гепард») (рис.7), установившего новый рекорд скорости для шагающих роботов. Четырехногий робот Cheetah смог разогнаться до 28,9 километров в час. Механика робота инспирирована самым быстрым животным на планете. Также как и гепард, робот развивает скорость за счет сгибания и разгибания «спины», что обеспечивает увеличение силы толчка конечностями.
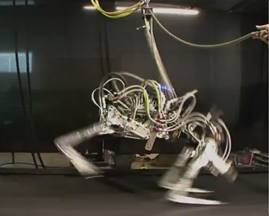
Рис. 7. Cheetah
В департаменте биологической кибернетики Бильфельдского университета был разработан новый робот-насекомое «Hector» (рис.8).

Рис. 8. Робот-насекомое «Hector»
«Hector» будет использоваться в CITEC и лабораториях Дании, Германии и Италии, как часть Европейского проекта EMICAB (Embodied Motion Intelligence for Cognitive, Autonomous Robots) — воплощение в движения интеллекта когнитивных автономных роботов. Робот будет учиться перемещаться автономно и подражать походке настоящих насекомых.
Платформа X-RHex (рис.9) схожа с Mini Mechadon. Однако у нее есть ощутимые преимущества в проходимости. Шесть «лап» робота синхронного вращаются «по три», примерно копируя методику перемещения прочих хексоподов. Только сами ноги представляют собой полукруглые упругие пластины с резиновым покрытием.
Такая конструкция позволяет роботу довольно успешно двигаться и по траве, песку, щебенке, грязи и многим другим типам поверхности, которые могут затруднять движение как колесных, так и шагающих роботов. При этом конструкция способна преодолевать достаточно заметные относительно собственных размеров препятствия.

Рис. 9. X-RHex
Робот iC Hexapod (рис.10) оборудован ПЗС-камерой и, работающем на 16-ти битном процессоре PIC. Зафиксировав лицо, робот начинает снимать.

Рис. 10. iC Hexapod
Норвежский специалист робототехники Каре Халворсен (Kare Halvorsen) воплотил в реальность мечты всех любителей фантастики. Он создал трансформирующегося робота MorpHex (рис.11), который может не только двигаться, но и катиться самостоятельно.

Рис. 11. MorpHex
Для обеспечения большей безопасности при проведении поиска мин компанией CSIC был разработан робот SIL06 (рис.12), имеющий шесть конечностей для передвижения. Двигательная система нового робота действует таким образом, что всегда три конечности находятся в устойчивом контакте с поверхностью, обеспечивая, таким образом, достаточную устойчивость всей конструкции в целом. Благодаря этой устойчивости и большому количеству конечностей, этот робот обладает хорошей маневренностью, скоростью передвижения и точностью движений, что является необходимым при проведении такого опасного мероприятия как разминирование местности.

Рис. 12. SIL06
Проживающий в штате Айова, американский изобретатель Дэвид Дорхаут (David Dourhout) разработал робота-фермера Prospero(рис.13). Робот, основываясь на командах программного обеспечения, может сеять семена определенных растений в определенных местах огорода и запоминать их местоположение. Изобретатель провел несколько успешных тестирований Prospero. В нем предусмотрена возможность взаимодействия с другими роботами-фермерами. Дэвид Дорхаут намерен в дальнейшем модернизировать своего робота, расширив его функциональность для выполнения различных работ, таких как, обработка грядок, устранение сорняков, поливка и другое.

Рис. 13. Prospero
Создатель Prospero считает, что роботы-фермеры смогут значительно повысить производительность сельского труда.
RiSE — это робот, который способен подниматься по вертикальным поверхностям (рис.14), таким как стены, деревья и заборы. Робот использует микро когти на конечностях, чтобы подниматься по текстурированным поверхностям. Подстраивает подвижный позвоночник, чтобы соответствовать кривизне поверхности и использует хвост как дополнительную опору на крутых подъемах. Размер робота 0.25 м, вес около 2 кг, скорость передвижения 0,3 м / с. Каждый из шести ног приводятся в движение парой электродвигателей. Бортовой компьютер управляет движением ног, опрашивает и анализирует данные с различных датчиков, в том числе датчиков положения, тензодатчиков и контактных датчиков.

Рис. 14. RiSE
Рассмотрим недостатки и достоинства представленных конструкций. Использование меньшего количества сервоприводов у шагающих роботов HexCrawler и Mini Hexapod уменьшает вес, упрощает систему обеспечения движения, но вместе с тем уменьшает маневренность, проходимость робота по местности со сложным рельефом.
Робот X-RHex не имеет возможности полной развязки конечностей от опорной поверхности, траектория движений конечностей не меняется, и нет возможности выбора произвольных точек опор для конечностей.
Шагающие машины Walking forest machine и SIL06 благодаря своей конструкции имеют высокую маневренность и проходимость, но не обладают автономностью и управляются водителем в первом случае и удаленным оператором — во втором.
Перспективными можно признать разработки фирмы Boston Dynamics — роботы BigDog, Cheetah, WildCat. Они прошли успешные испытания и благодаря применению современных технологий и усовершенствования алгоритмов систем управления, достигли результатов, ранее не доступных шагающим роботам. Область применения этих роботов — военные операции, а проект финансируется DARPA. Алгоритмы систем управления и их реализация является коммерческой тайной Boston Dynamics и не подлежат размещению в открытых источниках.
Робот-насекомое «Hector» был разработан в рамках проекта EMICAB для изучения продвинутых автономных движений. Алгоритмы и траектория движения конечностей строились на основе наблюдений за передвижением насекомых. В настоящее время робот Hector имеет на вооружении датчики и камеры малого радиуса действия, которые предоставляют информацию о положении робота и дают ему некоторое представление об окружающей среде.
Общие требования при построении шагающих робототехнических систем
В целом идея использования шагающих роботов рассматривается многими исследователями. Выбор конструкций зависит от задач, поставленных перед шагающей машиной. Возможность применения упрощенной конструкции, сокращения подвижности конечностей, упрощения систем управления, обеспечения движения возникает в случаях, когда к роботу не предъявлены требования перемещения по сложным поверхностям, в случаях, когда часть управления берет на себя оператор. В более жестких условиях, при необходимости действовать полностью или частично автономно и при заранее неизвестном состоянии опорной поверхностью, робот должен иметь конструкцию с большей степенью подвижности конечностей. Это приводит к необходимости построения сложной системы управления.
Конкретный уровень автоматизации управления движением шагающей машины зависит, от назначения машины и условий ее применения. Так информационные роботы, работающие в экстремальных условиях, при заранее неизвестном рельефом местности должны использовать сложные бортовые вычислительные комплексы, а для технологических шагающих машин применение таких систем не целесообразно.
Задачами системы управления становится управление большим числом степеней свободы, обеспечение требуемых кинематических и динамических параметров шагающих аппаратов, а в случае автономных роботов добавляются задачи навигации и ориентации в пространстве.
Программное обеспечение систем управления определяет свойства и характеристики шагающих роботов. Высокая неопределенность окружающей обстановки ограничивает возможность использования жестких алгоритмов управления конечностями. Очевидно, что в состав системы управления должны входить устройства определения положения корпуса робота и его конечностей в пространстве, контроля опорной поверхности, оценки и выбора маршрута движения, устройства для расширения функциональности робота, выполнения каких-либо сервисных функций.
Наиболее перспективным решением является заимствование алгоритмов перемещения конечностей у представителей живой природы (насекомых, млекопитающих, членистоногих). Однако простое копирование алгоритмов и траекторий движения конечностей недостаточно для того чтобы обеспечить движение робота по сложному рельефу. Необходимо построить систему очувствления робота и разработать алгоритмы корректировки движения каждой конечности, представляющую собой отдельный объект управления с одной стороны и часть системы обеспечения устойчивости — с другой. Управление каждой конечностью может осуществляться отдельным автономным модулем, который взаимодействует с другими такими же модулями.
Взаимодействие между частями (модулями) системы обеспечения устойчивости и движения представляет собой отдельный объект исследования. Алгоритмы их взаимодействия должны учитывать состояние каждого из них и вносить необходимые изменения в процессе шагания.
Заключение
Система управления является неотъемлемой частью систем шагающих машин, определяющая их возможности в целом. Применение алгоритмов, «подсмотренных» у живой природы вкупе с интеллектуальной системой корректировки движения позволит эффективно использовать все преимущества такого способа передвижения. И вопрос разработки таких систем управления в настоящее время чрезвычайно актуален.
Литература:
1. Nonami K. et al., Hydraulically Actuated Hexapod Robots: Design, Implementation and Control, Intelligent Systems, Control and Automation: Science and Engineering 66, Springer Japan 2014. 277 p.
2. Голубев Ю. Ф., Охоцимский Д. Е. Механика и управление движением автоматического шагающего аппарата. — М.: Наука, 1984. 312 с.
3. RHex — Devours Rough Terrain. [Электронный ресурс] — режим доступа: http://www.bostondynamics.com/robot_rhex.html
4. Walking Tractor Timberjack by John Deere. [Электронный ресурс] — режим доступа: http://www.theoldrobots.com/Walking-Robot2.html
5. SIL06 — шестиногий робот-миноискатель. [Электронный ресурс] — режим доступа: http://www.dailytechinfo.org/military/589-sil06-shestinogij-robot-minoiskatel.html
6. I. C. Hexapod. [Электронный ресурс] — режим доступа: http://www.micromagicsystems.com/#/ic-hexapod/4525033632
7. Робот-насекомое по имени Hector делает свои первые шаги. [Электронный ресурс] — режим доступа: http://www.dailytechinfo.org/robots/6573-robot-nasekomoe-po-imeni-hector-delaet-svoi-pervye-shagi.html
8. CHEETAH — Fastest Legged Robot. [Электронный ресурс] — режим доступа: http://www.bostondynamics.com/robot_cheetah.html
9. BigDog — The Most Advanced Rough-Terrain Robot on Earth. [Электронный ресурс] — режим доступа: http://www.bostondynamics.com/robot_bigdog.html
10. RiSE: The Amazing Climbing Robot. [Электронный ресурс] — режим доступа: http://www.bostondynamics.com/robot_rise.html
11. Meet Prospero: Robo-Farmer on Six Legs. [Электронный ресурс] — режим доступа: http://news.discovery.com/tech/robotics/swarm-bots-111221.htm
12. HexCrawler Robot. [Электронный ресурс] — режим доступа: http://www.robotbooks.com/hexcrawler.htm
13. Morphing DIY robot looks like a Portal ‘bot for real. [Электронный ресурс] — режим доступа: http://www.slashgear.com/morphing-diy-robot-looks-like-a-portal-bot-for-real-18325731/
