




Обзор программируемого комплекта робототехники Robotis
Авторы: Казагачев Виктор Николаевич, Куншашева Ботагоз Куаткызы, Жауынбаева Базархан Нурлыбеккызы
Рубрика: 8. Педагогика профессиональной школы и среднего профессионального образования
Опубликовано в
Дата публикации: 09.03.2016
Статья просмотрена: 850 раз
Библиографическое описание:
Казагачев, В. Н. Обзор программируемого комплекта робототехники Robotis / В. Н. Казагачев, Б. К. Куншашева, Б. Н. Жауынбаева. — Текст : непосредственный // Актуальные вопросы современной педагогики : материалы VIII Междунар. науч. конф. (г. Самара, март 2016 г.). — Самара : ООО "Издательство АСГАРД", 2016. — С. 233-236. — URL: https://moluch.ru/conf/ped/archive/188/9956/ (дата обращения: 19.04.2025).
Статья посвящена обзору робототехнического комплекта Robotis, его состав, виды. Использованию в учебном процессе.
Ключевые слова: робототехника, микроконтроллеры, программирование, Robotis.
Современному производству нужны инженерные кадры принципиально нового типа, обладающие трудовой и социальной мобильностью, способные решать технологические, эксплуатационные и управленческие задачи и имеющие глубокие профессиональные знания по ряду смежных профессий. Все это требует обновления методологии и содержания подготовки студентов инженерно-технического профиля.
Робототехника — область науки и техники, находящаяся на стыке механики, электроники и программирования. Сегодня разработки робототехники внедряют в различные направления человеческой деятельности: от военной техники и робоавтомобилей, до бытовой техники и детских игрушек. Действительно, робототехника сегодня одно из самых интенсивно развивающихся направлений науки и техники.
В связи с развитием роботов актуализировались проблемы обучения робототехнике на различных уровнях образования и различных возрастных категорий обучающихся. В колледжах, вузах внедряются курсы по робототехнике, ориентированные на условия учебного заведения: материально-техническая база, аппаратно-программное обеспечение, учебно-методическую поддержку и др.
Образовательная робототехника — сравнительно новая область, как в технике, так и в педагогической науке и занимается проблемами организации учебного процесса и внеурочной деятельности по обучению роботам. Организация процесса обучения невозможно без соответствующих образовательных ресурсов и средств.
Robotis Bioloid — набор для создания робота, производимый корейской фирмой Robotis . Набор предназначен для образовательных целей, а также для тех, кто увлекается робототехникой. Набор Bioloid включает в себя небольшие сервоприводы, называемые Dynamixels и представляющие собой самостоятельные модули, с помощью которых могут быть собраны роботы различной конструкции, например колёсные или шагающие роботы. Набор Bioloid схож с наборами LEGO Mindstorms от компании LEGO и Vex Robotics Design System от компании VEX Robotics. Набор Bioloid используется в Военно-морской академии США в качестве учебное оборудования. Набор Bioloid так же часто используют участники международных соревнований RoboCup.
В комплект Bioloid входят сервоприводы Dynamixels, набор сенсоров, программное обеспечение, включающее в себя среду 3D моделирования и среду программирования на С-подобном языке. Количество приводов достаточно, чтобы изготовить механизм с восемнадцатью степенями свободы.
Существует несколько комплектаций набора Robotis Bioloid:
Bioloid Beginner Kit — набор, позволяющий собрать до 14 вариантов конструкции робота.
Bioloid Comprehensive Kit — набор, позволяющий собрать до 26 вариантов конструкции робота.
Bioloid Expert Kit — набор, предназначенный для образовательных и исследовательских целей.
Bioloid Premium Kit — наиболее новая, модернизированная версия набора Robotis Bioloid

Рис. 1. Robotis Bioloid Comprehensive Robot Kit
The Robotis Bioloid Comprehensive Robot Kit — это первый робототехнический конструктор, основанный на «умных сервоприводах», которые позволяют пользователям создавать различные типы роботов. Этот комплект славится отличной подборкой программного обеспечения с графическими интерфейсами, что поможет легко обучаться. Конструктор идеально подходит для начинающих любителей робототехники, школ и университетов.
Программируется с помощью интуитивно понятного графического интерфейса или на языке C
Обрабатывает и анализирует изображение
Возможность управления сервоприводами через USB разъём
Алгоритм ходьбы использует машинную кинематику

Рис. 2. Функциональная схема робота
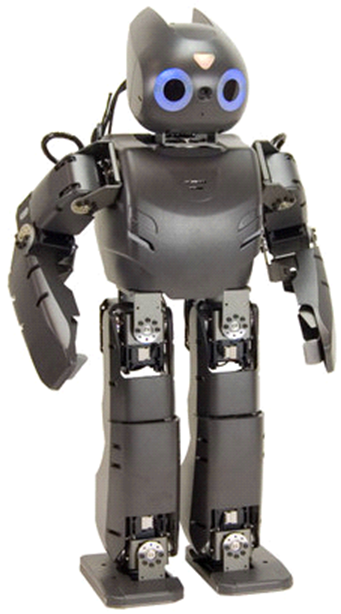
Рис. 3. ROBOTIS DARwIn-OP
DARwIn-OP — человекоподобный робот-платформа для научно-исследовательской деятельности. Отличается высокой производительностью и динамическими характеристиками, наличием зрения и встроенным ПК на базе процессора Intel. DARwIn-OP в переводе дословно расшифровывается как Динамический Антропоморфный Робот, обладающий Интеллектом, реализованный на Открытой Платформе.
DARwIn-OP — это компактный человекоподобный робот, представляющий собой уникальную робототехническую платформу, предназначенную для научных исследований, разработок в рамках образовательного процесса.
Детские конструкторы Robotis OLLO стали Robotis IDEAS и дополнились вторым уровнем Robotis Dream и третьим — Robotis Smart. Линейку Bioloid разделили на две части — Robotis Stem и Robotis Premium. Исследовательский DARwin-OP стоит особняком.
Программируются роботы Robotis OLLO, как и все другие роботы компании, с помощью фирменного программного обеспечения RoboPlus. Для программирования используется C-подобный язык. В состав ПО входят RoboPlus Task (редактор программ), RobotPlus Manager (настройка оборудования), RoboPlus Motion (программирование сложных движений робота), RoboPlus Terminal (терминал) и Dynamixel Wizard (настройка и калибровка сервоприводов).
Программа загружается в контроллер, после соединения его с компьютером (рис.4.) и, после загрузки контроллера, робот может выполнять команды. Программисты могут написать свою собственную прошивку для роботов Robotis OLLO на Embedded C.
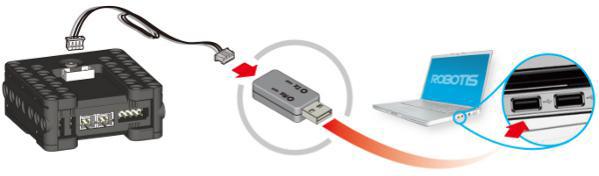
Рис. 4. Схема соединения компьютера с контроллером
Программы для роботов Robotis можно писать на смартфоне или планшете, под управлением Android 2.3 и выше.
Применение образовательной робототехники дает возможность одновременного освоения, закрепления знаний и отработки навыков сразу по нескольким предметам: информатике, прикладной механике, электротехнике и электроники. В свою очередь, формирование комплексных знаний способствует развитию системности мышления, учит комплексно подходить к решению реальных практических задач.
Литература:
- Абдулгалимов Г.Л, Гулюта А.А, Казагачев В.Н. Робототехника — массовый вид детского и молодежного технического творчества.// Информационные технологии в образовании. XXV Международная конференция-выставка. Сборник трудов Ч.II.-М. :Издательский отдел факультета ВМК МГУ имени М.В.Ломоносова, 2015. С. 21- 22.
- .Абдулгалимов Г.Л, Казагачев В.Н, Гулюта А.А.Обучение робототехнике: от элементарных понятий до программирования микроконтроллеров вузов // Новые информационные технологии в образовании: Сборник научных трудов 16-й международной научно-практической конференции "Новые информационные технологии в образовании" 2-3 февраля 2016г./ Под общ. ред. проф. Д.В.Чистякова. Часть 2.- М.: ООО "1С-Паблишинг", 2016. С. 309-311.
- Никитина Т.В. Образовательная робототехника как направление инженерно-технического творчества школьников. [Текст]: учебное пособие / Т.В. Никитина. Челябинск: Изд-во Челяб. гос. пед. ун-та, 2014. — 169 с.
- Толстова Н. А., Бондаренко Д. А, Ганьшин К. Ю. Образовательная робототехника как составляющая инженерно-технического образования. // «Наука. Инновации. Технологии», № 3, 2013. С.171-177.
Похожие статьи
Обзор программируемого комплекта робототехники Lego
Статья посвящена необходимости организации курса обучения робототехнике на LEGO Mindstorms NXT для студентов инженерно-технического профиля.
Особенности выбора технических средств обучения образовательной робототехнике в средней школе
В статье рассматриваются особенности использования робототехнических наборов на основе конструкторов и на основе макетных плат в процессе преподавания дисциплины «Робототехника»
Разработка автономного робота на базе Arduino Uno для создания изображений
В статье описывается процесс создания автономного робота-рисовальщика для создания сложных изображений.
Визуальное представление о программном обеспечении персонального компьютера
Статья раскрывает сущность программного обеспечения, основные направления в данной области.
Современное имитационное оборудование для автоматизированных систем управления
Приведены основные понятия имитационного моделирования. Рассмотрено имитационное оборудование на примере устройства ARP670. Указаны технические характеристики устройства. Рассмотрена схема применение имитационного оборудования ARP670 для взаимодейств...
Применение программного комплекса ANSYS в компьютерном моделировании
В статье представлены известные и современные программные комплексы для компьютерного моделирования конструкций, изделий и их составных частей. Программы основаны на методе конечных элементов, как метод численного моделирования и анализа. Показаны во...
Разработка робота для передвижения по пересеченной местности на базе микроконтроллера ATmega328P
В работе описывается методология разработки, реализации и отладки, а также технические решения при создании робота для передвижения по пересеченной местности полигона соревнования «Кубок РТК — Экстремал» на базе микроконтроллера ATmega328P. Данная р...
Обновленный инновационно-дидактический комплекс по механике
В статье рассмотрен обновленный инновационно-дидактический комплекс по механике, который представляет собой совокупность взаимосвязанных учебных пособий, патентов, монографий и других педагогических средств развивающего обучения студентов высших учеб...
Геоинформационные технологии программного обеспечения
В данной статье представлена информация по работе геоинформационной системы ArcGis фирмы ESRI, способы ее применения и недостатки. В то же время на рынке ПО присутствуют российские компании по разработке геоинформационных систем NextGIS QGIS и ГИС IN...
Изучение систем автоматизированного проектирования в учебном заведении
Статья посвящена вопросу изучения систем автоматизированного проектирования на занятиях с использованием современных станков с числовым программным обеспечением.
Похожие статьи
Обзор программируемого комплекта робототехники Lego
Статья посвящена необходимости организации курса обучения робототехнике на LEGO Mindstorms NXT для студентов инженерно-технического профиля.
Особенности выбора технических средств обучения образовательной робототехнике в средней школе
В статье рассматриваются особенности использования робототехнических наборов на основе конструкторов и на основе макетных плат в процессе преподавания дисциплины «Робототехника»
Разработка автономного робота на базе Arduino Uno для создания изображений
В статье описывается процесс создания автономного робота-рисовальщика для создания сложных изображений.
Визуальное представление о программном обеспечении персонального компьютера
Статья раскрывает сущность программного обеспечения, основные направления в данной области.
Современное имитационное оборудование для автоматизированных систем управления
Приведены основные понятия имитационного моделирования. Рассмотрено имитационное оборудование на примере устройства ARP670. Указаны технические характеристики устройства. Рассмотрена схема применение имитационного оборудования ARP670 для взаимодейств...
Применение программного комплекса ANSYS в компьютерном моделировании
В статье представлены известные и современные программные комплексы для компьютерного моделирования конструкций, изделий и их составных частей. Программы основаны на методе конечных элементов, как метод численного моделирования и анализа. Показаны во...
Разработка робота для передвижения по пересеченной местности на базе микроконтроллера ATmega328P
В работе описывается методология разработки, реализации и отладки, а также технические решения при создании робота для передвижения по пересеченной местности полигона соревнования «Кубок РТК — Экстремал» на базе микроконтроллера ATmega328P. Данная р...
Обновленный инновационно-дидактический комплекс по механике
В статье рассмотрен обновленный инновационно-дидактический комплекс по механике, который представляет собой совокупность взаимосвязанных учебных пособий, патентов, монографий и других педагогических средств развивающего обучения студентов высших учеб...
Геоинформационные технологии программного обеспечения
В данной статье представлена информация по работе геоинформационной системы ArcGis фирмы ESRI, способы ее применения и недостатки. В то же время на рынке ПО присутствуют российские компании по разработке геоинформационных систем NextGIS QGIS и ГИС IN...
Изучение систем автоматизированного проектирования в учебном заведении
Статья посвящена вопросу изучения систем автоматизированного проектирования на занятиях с использованием современных станков с числовым программным обеспечением.




