




Построение параметризации походки робота-гексапода

Авторы: Желонкина Ольга Сергеевна, Злобин Данил Юрьевич
Рубрика: 1. Математика
Опубликовано в
международная научная конференция «Исследования молодых ученых» (Казань, июнь 2019)
Дата публикации: 03.06.2019
Статья просмотрена: 1371 раз
Библиографическое описание:
Желонкина, О. С. Построение параметризации походки робота-гексапода / О. С. Желонкина, Д. Ю. Злобин. — Текст : непосредственный // Исследования молодых ученых : материалы I Междунар. науч. конф. (г. Казань, июнь 2019 г.). — Казань : Молодой ученый, 2019. — С. 4-7. — URL: https://moluch.ru/conf/stud/archive/339/15162/ (дата обращения: 10.04.2025).
В данной работе строится кинематическая модель шестиногого робота, рассматривается обратная задача кинематики построенной модели. Затем решается задача генерации походки, в рамках которой находятся траектории движения ног гексапода.
Ключевые слова: робототехника, робот, гексапод, кинематика, кинематическая модель, прямая задача кинематики, обратная задача кинематики, походка, шаговый цикл.
Введение
Удобство применения роботов в работе породило большое их разнообразие. Существуют колесные и гусеничные роботы, летающие и шагающие. Так, например, шагающие роботы имеют большую проходимость на пересеченной местности, нежели колесные роботы [1]. Среди шагающих роботов шестиногий сочетает в себе устойчивость конструкции и простоту управления. Он может использоваться для работы в труднодоступных или малопригодных для человека местах, например осматривая завалы после катастроф или собирая образцы на других планетах.
Кинематика робота-гексапода
Объектом исследования является шестиногий шагающий робот с платформой в виде равностороннего шестиугольника, в углах которого располагаются трехзвенные конечности, состоящие из промежуточного звена, бедра и голени.
Введем две системы координат: систему координат платформы ![]() и систему координат конечности
и систему координат конечности ![]() . Центр первой из них расположен в центре платформы робота, плоскость
. Центр первой из них расположен в центре платформы робота, плоскость ![]() совпадает с плоскостью платформы, ось
совпадает с плоскостью платформы, ось ![]() направлена в точку прикрепления первой ноги, ось
направлена в точку прикрепления первой ноги, ось ![]() направлена вверх относительно земли перпендикулярно платформе (предполагаем, что робот не переворачивается). Центр второй из них расположен в точке прикрепления ноги, плоскость
направлена вверх относительно земли перпендикулярно платформе (предполагаем, что робот не переворачивается). Центр второй из них расположен в точке прикрепления ноги, плоскость ![]() также совпадает с плоскостью платформы, ось
также совпадает с плоскостью платформы, ось ![]() направлена от центра платформы к точке прикрепления ноги, ось
направлена от центра платформы к точке прикрепления ноги, ось ![]() направлена, как и
направлена, как и ![]() .
.
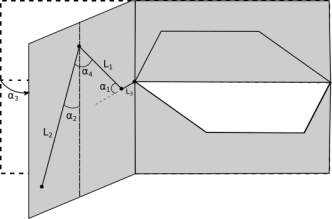
Рис. 1. Геометрическая модель ноги робота
Координаты стоп (оконечностей ноги) робота в системе координат конечности ![]() (углы показаны на рис. 1):
(углы показаны на рис. 1):
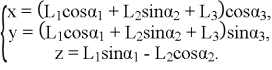 (1)
(1)
Решение обратной задачи кинематики
Мы получили выражение координат стопы через углы сочленений ноги, задачи подобного типа принято называть прямой задачей кинематики [3]. Далее естественно задаться вопросом о возможном обратном преобразовании координат стопы в углы ориентации, то есть провести решение обратной задачи кинематики. Используя геометрический метод [4], разрешим систему (1) относительно ![]() . В общем случае решение данной задачи не единственно, но выберем решение, которое соответствует верхнему расположению коленного сустава, как более естественное:
. В общем случае решение данной задачи не единственно, но выберем решение, которое соответствует верхнему расположению коленного сустава, как более естественное:
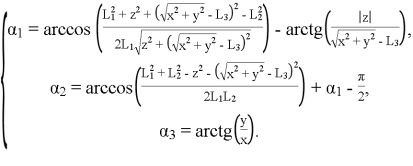 (2)
(2)
Последовательно вычисляя ![]() , найдем искомое решение системы.
, найдем искомое решение системы.
Параметризация походки
Для генерации походки разобьем конечности на две группы: с четными и нечетными номерами. В то время как одна группа ног располагается в воздухе, что соответствует фазе переноса, другая группа ног находится на земле, то есть в фазе опоры. Такая походка соответствует насекомым (например, муравьям и мухам), поэтому называется инсектовидной. Каждая фаза длится одинаковое время T. Разница фаз групп ног также составляет T. Рассмотрим шаговый цикл ноги гексапода. Траектория конечности в локальной системе координат представляет собой замкнутую кривую. Данную кривую можно условно разделить на две части, которые соответствуют фазе переноса ноги и фазе опоры ноги. При переносе конечности из одной точки в другую выбор траектории может быть осуществлен произвольным образом, так как стопа находится в свободном движении. В данной работе в качестве траектории переноса ноги используется полуэллипс. В фазе опоры нога движется по опорной поверхности вдоль прямой в направлении, обратном движению всего механизма.
Фаза переноса
Параметризация эллипса в системе координат конечности выглядит следующим образом:
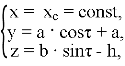
где:
− ![]() — полупериод одного шага, то есть время, за которое происходит перестановка одной тройки ног,
— полупериод одного шага, то есть время, за которое происходит перестановка одной тройки ног,
− ![]() — расстояние от платформы гексапода до земли,
— расстояние от платформы гексапода до земли,
− ![]() и
и ![]() — большая и малая полуоси эллипса соответственно.
— большая и малая полуоси эллипса соответственно.
Зависимость параметра τ от времени принята на основе работы [5]. Такой ее вид обеспечивает постановку ноги на землю с нулевой конечной скоростью, что позволяет избежать ударов.
Идея организации походки заключается в том, что плоскость траектории движения каждой стопы ставится под таким же углом к оси ![]() (ось системы координат платформы робота), как и направление движения механизма к этой оси. Угол, необходимый для постановки i-ой ноги в нужном направлении, равен:
(ось системы координат платформы робота), как и направление движения механизма к этой оси. Угол, необходимый для постановки i-ой ноги в нужном направлении, равен:
![]()
где ![]() — угол между направлением движения гексапода и осью
— угол между направлением движения гексапода и осью ![]() .
.
Для постановки плоскости траектории стопы гексапода нужным образом, проведем следующие действия: параллельным переносом сдвинем эллипс в плоскость
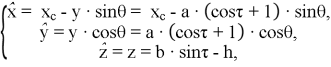 (3)
(3)
где ![]() .
.
Фаза опоры
Для нахождения части траектории, соответствующей фазе опоры ноги, соединим конечные точки эллипса. Уравнение соответствующей прямой можно записать в параметрическом виде:
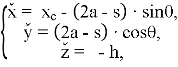 (4)
(4)
где ![]() .
.
Зависимость параметра от времени выбрана по аналогии с параметром τ, таким образом в граничных точках скорость обращается в ноль, следовательно, проскальзывание отсутствует.
Подставляя в систему уравнений (2) в качестве ![]() параметризации
параметризации ![]() из системы (3) и
из системы (3) и ![]() из системы (4), получим аналитический вид выражений углов в сочленениях гексапода от времени для фазы переноса и фазы опоры соответственно.
из системы (4), получим аналитический вид выражений углов в сочленениях гексапода от времени для фазы переноса и фазы опоры соответственно.
Заключение
Исследована кинематическая модель робота-гексапода, с помощью которой можно определить координаты стоп в зависимости от обобщенных координат. Решена обратная задача кинематики. В качестве походки выбрана походка, определяемая движением ног по тройкам (инсектовидная). Задана параметризация движения стопы в форме полуэллипса. Найдены соответствующие ей уравнения, которые позволяют осуществлять шаговый цикл в любом направлении
Литература:
- Potts, Alain & Jaime da Cruz, Jose. (2011). A Kinematical and Dynamical Analysis of a Quadruped Robot. DOI: 10.5772/25500.
- Ермолин В. С., Королев В. С., Потоцкая И. Ю. Теоретическая механика. Кинематика. СПб: ВВМ СПбГУ, 2012.
- John J. Craig. Introduction to Robotics: Mechanics and Control (3rd Edition). Pearson, 2004.
- Пименов В. Г., Ложников А. Б. Численные методы. Часть 2. Издательство Уральского университета, 2014.
- Павловский, В.Е., Панченко А. В. Модели и алгоритм управления движением малого шестиногого робота. Мехатроника, автоматизация, управление. — 2012. — № 11. — С.23 –28.
Ключевые слова
кинематическая модель, робототехника, робот, кинематика, прямая задача кинематики, гексапод, обратная задача кинематики, походка, шаговый циклПохожие статьи
Кинематическое управление шестиногим шагающим роботом
В данной работе строится кинематическая модель шестиногого робота, рассматривается обратная задача кинематики построенной модели в двух формах: аналитической и численной. Затем решается задача генерации походки в случае движения по ровной поверхности...
Решение обратной задачи динамики кинематических цепей
В данной работе рассматривается решение обратной задачи динамики кинематических цепей. Предполагается что тела соединены произвольными вращательными сочленениями. Важным аспектом повествования является использование тензорной формы механики, основанн...
Инверсная кинематика в системах захвата движения: алгоритм циклического покоординатного спуска и Qualisys Inverse Kinematics
В данной работе изучается реализация двух алгоритмов инверсной кинематики, использующиеся в системах захвата движения. На примере верхней конечности описывается решение прямой и инверсной задач кинематики в 2D пространстве, приводится пример из лабор...
Управление движением манипулятора в пространстве координат инструмента
В статье исследуется кинематическое управление манипулятора по программному движению его инструмента. Рассматривается метод планирования траектории в пространстве обобщенных координат. Строится программная траектория движения манипулятора на основе п...
Учебная компьютерная модель двойного пружинного маятника
В статье рассматривается компьютерная программа, реализующая модель вертикального двойного пружинного маятника. Она является примером программной части обучающей человеко-машинной системы. Приведена методика применения подобных учебных компьютерных м...
Анализ передаточной функции структурной схемы вентильного двигателя с помощью системы MATLAB
В данной статье рассматриваются структурная схема вентильного электродвигателя, приведен алгоритм определения передаточной функции не по правилам преобразований структурных схем, а с помощью решения системы алгебраических уравнений в символьном виде ...
Изучение проблемы протезирования, классификации протезов и способов связи их с человеком. Разработка бионического экзопротеза
В статье проведен анализ существующих вариантов протеза кисти, способов связи человека и протеза. После проведенного анализа был разработан бионический экзопротез, подробно описан использованный в нем принцип связи (ЭМГ), а также алгоритм работы и со...
Силы и моменты в кинематических цепях
В работе решается обратная задача динамики кинематических цепей. Полагается, что тела соединены произвольными вращательными сочленениями. Используется тензорное исчисление. В результате работы получены замкнутые аналитические выражения сил и моментов...
Робот и его семь маршрутов
В статье авторы приводят игру на бумаге, на примере которой сформулированы правила движения робота на плоскости. В явном виде приведена функциональная зависимость для классификации возможных маршрутов робота. Приведены результаты расчетов для определ...
Решение задачи управления перемещением квадрокоптера вдоль координатной оси
В статье рассматривается задача управления перемещением квадрокоптера вдоль координатной оси. За счет допустимых преобразований математическая модель приводится к системе из двух подсистем канонического вида. С помощью метода нелинейной стабилизации ...
Похожие статьи
Кинематическое управление шестиногим шагающим роботом
В данной работе строится кинематическая модель шестиногого робота, рассматривается обратная задача кинематики построенной модели в двух формах: аналитической и численной. Затем решается задача генерации походки в случае движения по ровной поверхности...
Решение обратной задачи динамики кинематических цепей
В данной работе рассматривается решение обратной задачи динамики кинематических цепей. Предполагается что тела соединены произвольными вращательными сочленениями. Важным аспектом повествования является использование тензорной формы механики, основанн...
Инверсная кинематика в системах захвата движения: алгоритм циклического покоординатного спуска и Qualisys Inverse Kinematics
В данной работе изучается реализация двух алгоритмов инверсной кинематики, использующиеся в системах захвата движения. На примере верхней конечности описывается решение прямой и инверсной задач кинематики в 2D пространстве, приводится пример из лабор...
Управление движением манипулятора в пространстве координат инструмента
В статье исследуется кинематическое управление манипулятора по программному движению его инструмента. Рассматривается метод планирования траектории в пространстве обобщенных координат. Строится программная траектория движения манипулятора на основе п...
Учебная компьютерная модель двойного пружинного маятника
В статье рассматривается компьютерная программа, реализующая модель вертикального двойного пружинного маятника. Она является примером программной части обучающей человеко-машинной системы. Приведена методика применения подобных учебных компьютерных м...
Анализ передаточной функции структурной схемы вентильного двигателя с помощью системы MATLAB
В данной статье рассматриваются структурная схема вентильного электродвигателя, приведен алгоритм определения передаточной функции не по правилам преобразований структурных схем, а с помощью решения системы алгебраических уравнений в символьном виде ...
Изучение проблемы протезирования, классификации протезов и способов связи их с человеком. Разработка бионического экзопротеза
В статье проведен анализ существующих вариантов протеза кисти, способов связи человека и протеза. После проведенного анализа был разработан бионический экзопротез, подробно описан использованный в нем принцип связи (ЭМГ), а также алгоритм работы и со...
Силы и моменты в кинематических цепях
В работе решается обратная задача динамики кинематических цепей. Полагается, что тела соединены произвольными вращательными сочленениями. Используется тензорное исчисление. В результате работы получены замкнутые аналитические выражения сил и моментов...
Робот и его семь маршрутов
В статье авторы приводят игру на бумаге, на примере которой сформулированы правила движения робота на плоскости. В явном виде приведена функциональная зависимость для классификации возможных маршрутов робота. Приведены результаты расчетов для определ...
Решение задачи управления перемещением квадрокоптера вдоль координатной оси
В статье рассматривается задача управления перемещением квадрокоптера вдоль координатной оси. За счет допустимых преобразований математическая модель приводится к системе из двух подсистем канонического вида. С помощью метода нелинейной стабилизации ...




