




Система управления активно управляемой газомагнитной опорой

Автор: Ульянов Александр Владимирович
Рубрика: 3. Автоматика и вычислительная техника
Опубликовано в
Дата публикации: 02.10.2014
Статья просмотрена: 301 раз
Библиографическое описание:
Ульянов, А. В. Система управления активно управляемой газомагнитной опорой / А. В. Ульянов. — Текст : непосредственный // Современные тенденции технических наук : материалы III Междунар. науч. конф. (г. Казань, октябрь 2014 г.). — Казань : Бук, 2014. — С. 49-52. — URL: https://moluch.ru/conf/tech/archive/123/6303/ (дата обращения: 24.04.2025).
В данной статье рассмотрена программная реализации системы управления активно управляемой газомагнитной опорой с использованием встраиваемого контроллера SBRIO-9636 под управлением Labview.
Ключевые слова: Labview, PWM, газомагнитная опора, FPGA, SBRIO-9636, система управления, LabView Real-Time, ПИД.
Система управления газомагнитной опорой [1–3] реализует закон управления по току. Главной составляющей системы управления является промышленный контроллер SBRIO-9636. В данный контроллер записана программа управления, которая состоит из двух частей: первая часть записывается в программируемую интегральную схему FPGA (ПЛИС) и конфигурирует порты ввода вывод, АЦП платы SBRIO-9636 листинг показан на рисунке 1.
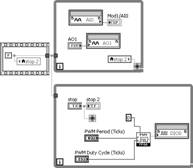
Рис. 1. Программа, конфигурирующая вывода ПЛИС и управляемый ШИМ
Программа, показанная на рисунке 1, работает следующим образом: при инициализации контроллера SBRIO-9636 операционная система реального времени загружает из энергонезависимой памяти конфигурационный файл для ПЛИС. Данный файл содержит два главных цикла. Первый цикл конфигурирует АЦП и ЦАП платы на заданный режим сбора информации вывод AI0 подключает внешний датчик перемещений [2] в диапазоне входного напряжения от 0 до 10 В, а вывод AO1 — подключает выход ЦАП для вывода сигнала задания, первый цикл останавливается локальной переменной stop синхронно с остановкой всей программы. Второй цикл содержит реализацию широтно-импульсной модуляции (ШИМ) упакованный в отдельный виртуальный прибор PWM FPGA показанный на рис. 2.
Подпрограмма, показанная на рисунке 2, реализует регулируемый ШИМ сигнал с возможностью ограничения минимального периода сигнала, программа использует тактируемый цикл работающий на частоте 40 МГц.
Рис. 2. Подпрограмма широтно-импульсной модуляции с регулировкой скважности и частоты
Вы ходом ШИМ является терминал PWM DO, частота ШИМ выводится на терминал PWM Clock, данная подпрограмма упакована в отдельный виртуальный прибор, который просто добавился во второй цикл программы, показанной на рисунке 2. Управляющими терминалами во второй цикле является терминал задания частоты ШИМ — PWM Period и скважности — PWM Duty. Выход ШИМ подается на цифровой вывод платы SBRIO–9636–DIO0.
Главная управляющая программа (приложение), располагается в операционной системе реального времени LabView Real-Time в которой реализован ПИД регулятор.
В общем случае процесс проектирование системы управления газомагнитной опорой включает следующие основные этапы:
1. Создание и компоновка проекта целевыми устройствами, конфигурирование ресурсов системы.
2. Разработка FPGA VI, определяющего структуру FPGA выполняемые функции устройства SBRIO-9636.
3. Разработка и отладка программного обеспечения Real Time VI, исполняемого в контроллере реального времени.
4. Разработка и отладка программы верхнего уровня — Host VI, с помощью которой производится некретичная ко времени обработка данных, сохраняются на диске или выдаются оператору результаты сбора и обработки данных, осуществляется контроль функционирования системы.
5. Комплексная отладка и тестирование системы.
6. Изготовление исполняемого файла, инсталлятора.
В зависимости от выбранной аппаратной платформы и конечной цели проектирование некоторых этапов могут не выполняться, но этапы 1,2,4,5 должны быть реализованы в любом случае.
Применение технологий LabView Real-Time позволяет программировать задачи для управления в реальном времени, так как технология Real-Time имеет три абсолютных преимущества:
Быстрота реагирования — управляющее приложение должно реагировать на события такие, как изменение сигналов ввода — вывода, вводимых оператором данных или команд или изменения внутреннего состояния. Время, необходимое на выполнение действия после возникновения события, называется временем реагирования, требуемое время реагирования является важным критерием управляющего приложения, потому что оно определяет быстродействие контура регулирования и влияет на ввод-вывод, процессор и программное решение.
Детерминизм и джиттер-детерминизм — это повторяемость временных характеристик контура регулирования. Джиттер, погрешность синхронизации — мера измерения детерминизма. Повышение характеристики детерминизма и надежности — главные преимущества управляющей системы реального времени, а высокий детерминизм критерий для стабильности работы приложения.
Приоритет — в большинстве контроллеров используется единственный процессор для выполнения всех задач управления, мониторинга и связи. Поскольку единственный ресурс (процессор) получает несколько параллельных запросов, необходимо найти способ управления наиболее важными запросами. Придав критическим контурам регулирования более высокий приоритет, можно получить полнофункциональный контроллер с высоким уровнем детерминизма и временем реагирования.
Таким образом, с учетом все перечисленных положительных качеств системы реального времени была разработана программа управления каналом газомагнитноной опорой показанной на рисунке 3.
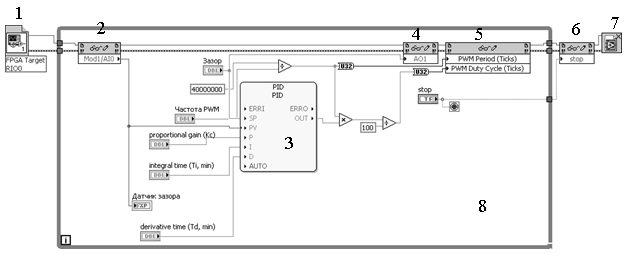
Рис. 3. Управляющая программа ПИД регулятора выполняемая в Real-Time
Управляющая программа, представленная на рисунке 3, работает следующим образом, вначале вызывается Open FPGA VI Referenc (1) подпрограмма, которая передает данные выходных терминалов в главный цикл (8) в котором располагаются функции чтения FPGA Read/Write Control (2,4,5,6). Функция FPGA Read/Write Control (2) выводит значения датчика перемещения и заводится на ПИД регулятор (3) в терминал PV. ПИД регулятор (3) реализован с помощью функции PID стандартной библиотеке LabView и имеет пять входных параметров: SP — значение требуемого эксцентриситета, PV — вход датчика обратной связи, P — коэффициент усиления пропорционального звена, I — постоянная времени интегрирования, D — постоянная времени дифференцирования. Коэффициенты регулятора ПИД (3) рассчитываются исходя из математической модели [4] и подставляются в терминалы P, I, D. Функциональный блок ПИД регулятора располагается в палитре Control Function Block показан на рисунке 4.
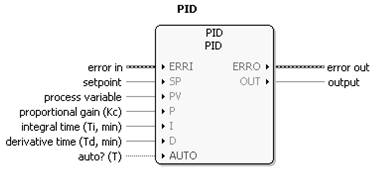
Рис. 4. Функциональный блок ПИД регулятор
При двойном нажатии на функциональный блок ПИД регулятора вызываются настройки блока рисунок 5.
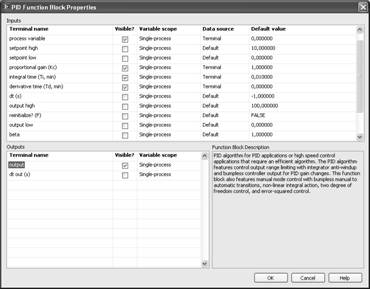
Рис. 5. Настройки блока ПИД регулятора
В данном меню выставляются, такие параметры как значение уставки (set point high / set point low) максимальное значение выставляется в 10 минимальное в 0 так как максимальное выходное значение с датчика перемещения составляет 10 В, а минимальное 0 В и ограничение выходного значения регулятора параметры output low / high эти параметры выставляются в значение 0 и 100 так как выходным параметром является изменение скважности ШИМ от 0 до 100 %. Для преобразование выходного значение ПИД регулятора в регулируемую скважность в программе используется следующее преобразование исходя из того что система работает на частоте 40 МГц:
 (1)
(1)
 где
где  — частота ШИМ сигнала, Гц,
— частота ШИМ сигнала, Гц,
 — Значение скважности с выхода ПИД регулятора, %.
— Значение скважности с выхода ПИД регулятора, %.
После преобразование по формуле (1) данные преобразуются в U32 — тридцати двух разрядный формат и поступают на терминал 5 рисунок 3 на вход PWM Duty Cycle. Так же в терминале 5 рисунок 3 задается параметр PWM Period — Частота модуляции ШИМ этот параметр пользователь может задавать сам от 0 до 200 кГц. После того как все параметры выставлены и рассчитаны коэффициенты регулятора программа загружается в целевое устройство SBRIO-9636 где уже выполняется автономно без участия пользователя.
Литература:
1. Ульянов, А. В. Повышение точности вращения валов высокоскоростных роторных систем./ А. В. Космынин, В. С. Щетинин, С. М. Копытов, А. С. Хвостиков // Ученые записки КнАГТУ — 2013- № 3 –1(15).- С47–51.
2. Ульянов, А. В. Способ измерения рабочего зазора бесконтактных подшипников./ С. М. Копытов, А. В. Космынин// Современные наукоемкие технологии, 2013г, № 3, С.40–42.
3. Ульянов, А. В. Разработка и моделирование газомагнитных опор./ С. М. Копытов, А. В. Космынин, В. С. Щетинин, А.С Хвостиков// «Науч.-тех. творчество аспирантов и студентов», ч. _ — Комс.-н/А 2013г., С.357–359
4. Ульянов, А. В. Газомагнитная опора с активным управлением магнитной силой.// «Сборник статей по материалам XXI Международной заочной научно-практической конференции «Научная дискуссия: вопросы технических наук»», № 4(17) — Москва 2014г., С.131–134.
Ключевые слова
система управления, LabVIEW, ПИД, FPGA, PWM, газомагнитная опора, SBRIO-9636, LabView Real-TimeПохожие статьи
Реализация процессов обратного инжиниринга при обучении на примере пятигранной режущей пластины
Представлена структура шагов, охватывающих этапы с момента оцифровки твердотельного объекта пьезосканирующей головкой до разработки управляющей программы по сгенерированным траекториям обработки CAD-модели в CAM-модуле.
Концепция калибровки потока экструдера для 3D-принтеров на базе FDM-технологии на примере модели Anycubic Chiron
В статье описывается концепция и пошаговая методика калибровки потока на экструдерах типа «Боуден» с описанием команд для работы в терминале и изменения конфигуратора прошивки контроллера.
Создание имитационной модели трёхосной подвески автотранспортного средства в среде Anylogic
В статье приведена упрощенная математическая модель. Представлен набор программных модулей. Создана имитационная модель в среде Anylogic. Приведены результаты работы.
Особенности программирования микроконтроллера GPS-модуля A9G
В статье автор рассматривает особенности программирования модуля Ai-Thinker A9G для работы в качестве GPS датчика для автономных навигационных систем.
Разработка системы управления асинхронным электродвигателем и исследование режимов его работы
В статье приводятся результаты моделирования в среде MATLAB системы векторного управления (СВУ) асинхронным электродвигателем с короткозамкнутым ротором (АДКР) в режиме регулирования скорости.
Разработка Simulink-модели АЦП поразрядного взвешивания
Настоящая статья посвящена реализации одного из основных методов аналого-цифрового преобразования — метода поразрядного взвешивания. Разработана программная модель такого аналого-цифрового преобразователя в среде моделирования Matlab пакета расширени...
Разработка программы для оптического распознавания символов с помощью Tesseract
В данной статье наглядно и подробно рассмотрен пример работы с библиотекой Tesseract ORC, создана программа для распознавания текста с фото.
Использование микроконтроллеров широкого применения для разработки устройств аудиообработки
В статье рассматривается вопрос, о возможности использования микроконтроллеров (далее MCU) широкого применения, построенных на базе ядер Arm ®Cortex ® M, в сфере цифровой обработки сигнала (далее DSP). На примере устройства, обработки аналогово звуко...
DC-DC преобразователь на базе MP1484EN
Данная статья носит обзорный характер и посвящена вопросу проектирования источника питания на базе известной микросхемы импульсного DC — DC преобразователя MP1484EN, применяемой в источниках питания электронных устройств разного назначения.
Конфигурирование и тестирование производительности вычислительного кластера на базе неоднородных многоядерных узлов
В работе рассматривается выбор оборудования, программного обеспечения, вопросы настройки и тестирования производительности вычислительного кластера на базе небольшого числа неоднородных многоядерных серверных узлов. Оценка производительности выполняе...
Похожие статьи
Реализация процессов обратного инжиниринга при обучении на примере пятигранной режущей пластины
Представлена структура шагов, охватывающих этапы с момента оцифровки твердотельного объекта пьезосканирующей головкой до разработки управляющей программы по сгенерированным траекториям обработки CAD-модели в CAM-модуле.
Концепция калибровки потока экструдера для 3D-принтеров на базе FDM-технологии на примере модели Anycubic Chiron
В статье описывается концепция и пошаговая методика калибровки потока на экструдерах типа «Боуден» с описанием команд для работы в терминале и изменения конфигуратора прошивки контроллера.
Создание имитационной модели трёхосной подвески автотранспортного средства в среде Anylogic
В статье приведена упрощенная математическая модель. Представлен набор программных модулей. Создана имитационная модель в среде Anylogic. Приведены результаты работы.
Особенности программирования микроконтроллера GPS-модуля A9G
В статье автор рассматривает особенности программирования модуля Ai-Thinker A9G для работы в качестве GPS датчика для автономных навигационных систем.
Разработка системы управления асинхронным электродвигателем и исследование режимов его работы
В статье приводятся результаты моделирования в среде MATLAB системы векторного управления (СВУ) асинхронным электродвигателем с короткозамкнутым ротором (АДКР) в режиме регулирования скорости.
Разработка Simulink-модели АЦП поразрядного взвешивания
Настоящая статья посвящена реализации одного из основных методов аналого-цифрового преобразования — метода поразрядного взвешивания. Разработана программная модель такого аналого-цифрового преобразователя в среде моделирования Matlab пакета расширени...
Разработка программы для оптического распознавания символов с помощью Tesseract
В данной статье наглядно и подробно рассмотрен пример работы с библиотекой Tesseract ORC, создана программа для распознавания текста с фото.
Использование микроконтроллеров широкого применения для разработки устройств аудиообработки
В статье рассматривается вопрос, о возможности использования микроконтроллеров (далее MCU) широкого применения, построенных на базе ядер Arm ®Cortex ® M, в сфере цифровой обработки сигнала (далее DSP). На примере устройства, обработки аналогово звуко...
DC-DC преобразователь на базе MP1484EN
Данная статья носит обзорный характер и посвящена вопросу проектирования источника питания на базе известной микросхемы импульсного DC — DC преобразователя MP1484EN, применяемой в источниках питания электронных устройств разного назначения.
Конфигурирование и тестирование производительности вычислительного кластера на базе неоднородных многоядерных узлов
В работе рассматривается выбор оборудования, программного обеспечения, вопросы настройки и тестирования производительности вычислительного кластера на базе небольшого числа неоднородных многоядерных серверных узлов. Оценка производительности выполняе...




