




К выбору системы управления многокатушечным длинноходовым электромагнитом
Автор: Ромшин Ярослав Андреевич
Рубрика: 4. Электротехника
Опубликовано в
IV международная научная конференция «Технические науки в России и за рубежом» (Москва, январь 2015)
Дата публикации: 09.01.2015
Статья просмотрена: 653 раза
Библиографическое описание:
Ромшин, Я. А. К выбору системы управления многокатушечным длинноходовым электромагнитом / Я. А. Ромшин. — Текст : непосредственный // Технические науки в России и за рубежом : материалы IV Междунар. науч. конф. (г. Москва, январь 2015 г.). — Москва : Буки-Веди, 2015. — С. 44-47. — URL: https://moluch.ru/conf/tech/archive/124/7050/ (дата обращения: 26.04.2025).
Одной из разновидностей электромагнитов постоянного тока являются так называемые длинноходовые электромагниты. Их обмотка зачастую состоит из нескольких независимых катушек, расположенных в пазу единого магнитопровода и соединенных магнитной связью. Использование нескольких катушек позволяет уменьшить тепловые потери и, соответственно, увеличить КПД устройства за счет того, что каждая катушка находится в работе в течение времени  , где t — общее время движения якоря, n — количество катушек в обмотке.
, где t — общее время движения якоря, n — количество катушек в обмотке.
Для того, чтобы обеспечить последовательное включение и выключение катушек необходима система управления, которая включает силовые ключи, обеспечивающие быструю коммутацию тока и схему формирования импульсов управления. В данной статье предлагается один из вариантов реализации такой системы.
Рассмотрим длинноходовой электромагнит, обмотка которого содержит три одинаковые катушки (рисунок 1).
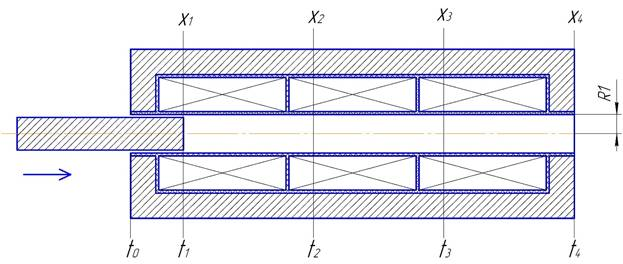 Рис. 1. Длинноходовой электромагнит
Рис. 1. Длинноходовой электромагнит
Определено, что максимальная скорость достигается якорем при включении катушек в моменты времени, когда якорь прошел расстояние 1,1·R1 от начала катушки, где R1 — внутренний радиус катушки [1]. Эти моменты времени обозначим t1, t2, t3 соответственно для каждой катушки (рисунок 1). Каждому моменту времени соответствует своя точка старта, обозначим их х1, х2, х3 соответственно.
Устройство электромагнита можно условно разделить на две части: силовая часть и логическая.
На рисунке 2 изображена принципиальная схема силовой части. Обмотка электромагнита включает катушки L1-L3 с общим магнитопроводом. В качестве коммутирующих ключей использованы полевые транзисторы с изолированным затвором VT1-VT3. Для управления такими транзисторами требуется сравнительно небольшой ток, который могут обеспечить выходы стандартных микросхем ТТЛ или К-МОП логики. Параллельно транзисторам подключены варисторы RU1-RU3, которые защищают транзисторы от выхода из строя при их выключении. Источником энергии служат предварительно заряженные конденсаторы (схема заряда не изображена).
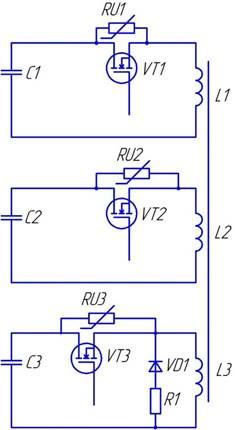
Рис. 2. Принципиальная схема силовой части электромагнита
Устройство работает следующим образом. В момент времени t1 открывается транзистор VT1, конденсатор С1 разряжается на катушку L1, под действием электромагнитной силы якорь движется в направлении, указанном на рисунке 1, вторая и третья катушки отключены. При достижении якорем точки х2 с помощью транзистора VT2 включается катушка L2, С2 разряжается на L2, одновременно с этим VT1 закрывается, L1 отключается. Аналогично в точке х3 открывается транзистор VT3, включается катушка L3, VT2 закрывается, С3 разряжается. Когда якорь достигнет точки х4 закрывается транзистор VT3, отключая L3. Остаточный ток замыкается по цепи L3-R1-VD1 и спадает до нуля. Условно цикл работы устройства может быть отражен в виде таблицы состояний транзисторов в соответствующие промежутки времени, где 0 — транзистор закрыт, 1 — транзистор открыт (таблица 1).
Таблица 1
Алгоритм работы устройства
|
|
t0 — t1 |
t1 — t2 |
t2 — t3 |
t3 — t4 |
t4 — ∞ |
|
VT1 |
0 |
1 |
0 |
0 |
0 |
|
VT2 |
0 |
0 |
1 |
0 |
0 |
|
VT3 |
0 |
0 |
0 |
1 |
0 |
Для реализации данного алгоритма необходим генератор импульсов. В качестве генератора импульсов управления предлагается использовать три одновибратора (ждущих мультивибратора), запускаемых по очереди [2] (рисунок 3).
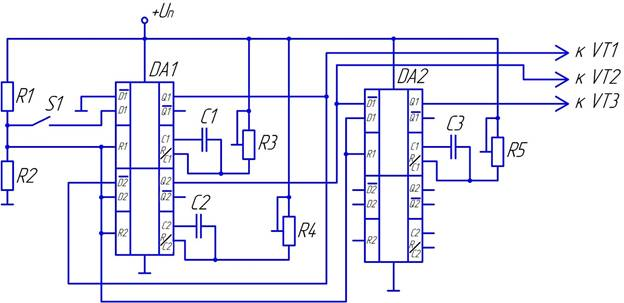 Рис. 3. Принципиальная схема логический части электромагнита
Рис. 3. Принципиальная схема логический части электромагнита
Микросхемы DA1 и DA2 содержат по два одинаковых одновибратора с возможностью запуска по фронту или по спаду. Питание микросхем осуществляется от однополярного источника постоянного напряжения +Uп. Делитель из резисторов R1 и R2 обеспечивает напряжение лог.1. Первый одновибратор в микросхеме DA1 запускается по фронту. Для этого необходимо подать на инверсный входлог.0, а на вход сброса R1 — лог.1. После замыкания ключа S1, на неинверсном входе D1 появится лог.1 и одновибратор запустится. На выходе Q1 сгенерируется импульс амплитудой близкой к Uп. Длительность этого импульса определяется емкостью конденсатора С1 и сопротивлением резистора R3 согласно формуле
Ти = 0,7 R3·С1 (1)
Изменяя сопротивление подстроечного резистора можно менять длительность выходного импульса.
С выхода Q1 импульс подается на затвор транзистора VT1 и параллельно на инверсный вход одновибратора, который настроен на запуск по спаду входного импульса. Для задания режима работы по спаду необходимо подать лог.1 на неинверсный вход D2 и вход сброса R2.
Через время t = Ти1 на выходе Q1 установится 0, а на выходе Q2 появится импульс, длительность которого аналогично первому одновибратору задается элементами С2, R4. С выхода Q2 импульс поступает на затвор транзистора VT2 и на инверсный вход одновибратора в микросхеме DA2, который также настроен на запуск по спаду. По окончании второго импульса длительностью Ти2 на выходе Q2 микросхемы DA1 установится 0, а на выходе Q1 микросхемы DA2 сгенерируется импульс длительностью Ти3, определяемой элементами С3, R5. После завершения цикла на всех выходах DA1 и DA2 установится 0.
Таким образом осуществляется генерация трех последовательных импульсов с независящей друг от друга длительностью. Преимущество использования такой схемы в том, что длительность генерируемого ждущим мультивибратором импульса не зависит от длительности запускающего импульса. Кроме того, во время генерации выходного импульса ждущий мультивибратор нечувствителен к изменению входных сигналов, что исключает случайный запуск и повышает стабильность работы.
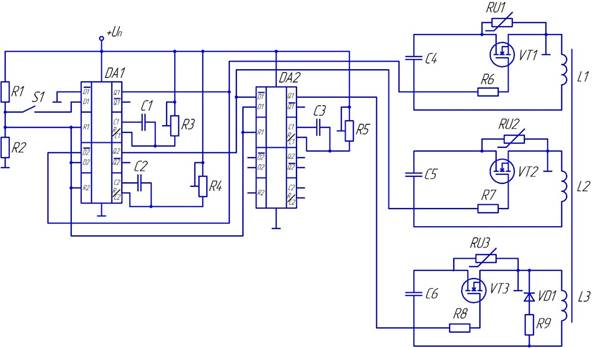
Рис. 4. Принципиальная схема электромагнита
На рисунке 4 изображена полная принципиальная схема электромагнита.
В схеме помимо уже описанных элементов присутствуют резисторы R6-R8 в затворных цепях транзисторов, служащие для ограничения тока управления. Истоки транзисторов объединены и соединены с общей точкой схемы управления, так как относительно них подается напряжение управления.
Рассмотрим пример расчета и выбора элементов схемы.
Для генератора импульсов используем две микросхемы К155АГ3. Каждая из них содержит два одинаковых одновибратора [3]. Микросхемы серии К155 используют ТТЛ логику, поэтому для их питания используем стабилизированный источник напряжением 5 В. Напряжение высокого уровня для ТТЛ логики составляет > 2,4 В. Исходя из этого выбираем сопротивления R1 и R2 такими, чтобы в средней точке делителя было напряжение ≈ 2,5 В. Пусть сопротивление R1 = 1 кОм, тогда R2 = 1000/2 = 500 Ом, т. к. соотношение входного и выходного напряжения делителя составляет 5/2,5 = 2.
Определяем параметры времязадающих цепочек. Пусть длительности выходных импульсов соответственно равны Ти1 = 10 мс, Ти2 = 8 мс, Ти3 = 12 мс. Задаемся значением емкостей конденсаторов: С1 = С2 = С3 = 10 мкф и по формуле 1 определяем R3, R4, R5:
 = 1428 Ом;
= 1428 Ом;
 = 1142 Ом;
= 1142 Ом;
 = 1714 Ом.
= 1714 Ом.
Для всех трех цепочек выбираем из стандартного ряда подстроечный резистор сопротивлением 2 кОм.
Выбираем силовые транзисторы, исходя из условия, что напряжение управления составляет ≈ 4,5 В. Например, можно использовать n-канальный полевой транзистор FDP15N40 [4]. Согласно документации минимальное напряжение затвор-исток оставляет 3 В, максимальное — 5 В. Также стоит обратить внимание на параметры максимального напряжения сток-исток UСИmax и максимального тока стока IСmax. Допустим напряжение на конденсаторах С4-С6 не будет превышать 250 В, а максимальный ток в катушках составит не больше 10 А. Сравним эти значения с параметрами транзистора: UСИmax = 400 В, IСmax = 15 А. Видим, что и по току, и по напряжению имеем запас в 1,5 раза, значит в данной схеме допускается использование данного транзистора.
Резисторы R6-R8 выбираем исходя из необходимого тока управления Iупр, который определяется требуемым временем включения транзисторов по формуле:
 , (2)
, (2)
где Q — заряд, необходимый для полного открытия транзистора, ton — время включения транзистора.
Пусть необходимое время включения ton = 10 мкс, Заряд определяем из документации Q = 10 нКл. Тогда по формуле 2
 = 1 мА.
= 1 мА.
При условии, что время включения для всех транзисторов одинаковое, определяем сопротивления R6-R8:
 = 4,5 кОм,
= 4,5 кОм,
где UЗИ = 4,5 В — напряжение управления.
Параллельно транзисторам в качестве ограничителей напряжения подключены варисторы, которые выбираются по напряжению ограничения Uогр из условия UCmax < Uогр < UСИmax, где UCmax — максимальное напряжение на соответствующем конденсаторе (С4-С6), UСИmax — максимальное напряжение сток-исток для выбранного транзистора.
Диод VD1 выбирается по значениям максимального обратного напряжения, которое не должно быть меньше UCmax, и максимального прямого тока, который должен быть больше тока через L3.
Представленная система управления обладает рядом преимуществ. Первое из них — это простота реализации и доступность компонентов. Второе — стабильность в работе и высокая помехоустойчивость. Третье — низкое потребление энергии, особенно при использовании микросхем ТТЛ-логики. Стоит отметить, что микросхемы К155АГ3 можно заменить на аналогичные микросхемы, использующие К-МОП логику, К555АГ3. Формулы расчета при этом остаются прежними, однако напряжение источника питания придётся увеличить до 12 В, но при этом облегчается выбор силовых ключей, потому что у большинства полевых транзисторов минимальное напряжение управления составляет 10 В.
Литература:
1. Ивашин, В. В. Исследование длинноходового электромагнитного преобразователя на поперечных потоках [Текст] / В. В. Ивашин, В. А. Медведев; Тольяттинский политехнический ин-т. — Тольятти, 1990–16 с.: схемы.
2. Шелестов, И. П. Радиолюбителям: полезные схемы. Книга 1 [Текст] / И. П. Шелестов. — М.: СОЛОН, 1998–187 с.: схемы.
3. Интегральные микросхемы: Справочник [Текст] / Б. В. Тарабрин, Л. Ф. Лунин, Ю. Н. Смирнов и др.; Под ред. Б. В. Тарабрина. — М.: Радио и связь, 1984–528 с.: ил.
4. Fairchild Semiconductor [Электронный ресурс]. 2014. URL: http://www.fairchildsemi.com. (Дата обращения: 20.12.2014).




