




К вопросу контролирования тока при работе многокатушечного длинноходового электромагнита

Автор: Ромшин Ярослав Андреевич
Рубрика: 4. Электротехника
Опубликовано в
III международная научная конференция «Актуальные вопросы технических наук» (Пермь, апрель 2015)
Дата публикации: 07.04.2015
Статья просмотрена: 90 раз
Библиографическое описание:
Ромшин, Я. А. К вопросу контролирования тока при работе многокатушечного длинноходового электромагнита / Я. А. Ромшин. — Текст : непосредственный // Актуальные вопросы технических наук : материалы III Междунар. науч. конф. (г. Пермь, апрель 2015 г.). — Пермь : Зебра, 2015. — С. 79-83. — URL: https://moluch.ru/conf/tech/archive/125/7818/ (дата обращения: 03.04.2025).
Для правильной работы многокатушечного длинноходового электромагнита [1] очень важным является обеспечение хорошей магнитной связи между катушками с целью эффективной передачи энергии из одной катушки в другую. Однако может возникнуть режим, при котором индукция в магнитопроводе достигнет значения индукции насыщения, и тогда магнитные свойства материала магнитопровода резко ухудшатся. Это неизбежно приведёт к снижению КПД устройства и преждевременному выходу из строя. Для исключения подобных режимов необходимо контролировать значение силы тока в катушках, особенно на этапе отладки устройства.
Ухудшение магнитных свойств материала выражается уменьшением его относительной магнитной проницаемости µ согласно формуле 1 и увеличением магнитного сопротивления RM, определяемого по формуле 2 [2]:
 →
→  , (1)
, (1)
где H — напряженность магнитного поля, µ0 — магнитная постоянная, В — индукция магнитного поля.
 , (2)
, (2)
где l — длина участка магнитопровода, S — площадь его поперечного сечения.
Из закона полного тока известно:
 , (3)
, (3)
где i — сила тока в катушке, w — число витков катушки.
Определим связь В и i, объединив формулы 1 и 3:
 . (4)
. (4)
Отсюда видим, что индукция в магнитопроводе прямо пропорциональна току в катушке, и чрезмерное увеличение тока может привести к насыщению и потере материалом своих ферромагнитных свойств. Возникает задача каким-то образом контролировать значение силы тока.
Самым простым и наиболее очевидным способом контроля является включение в цепь катушки амперметра. Однако процессы нарастания тока и передачи энергии в электромагните происходят достаточно быстро, и инерционность амперметра в этом случае может не позволить произвести правильное и своевременное измерение. Кроме того большинство амперметров, как аналоговых, так и цифровых показывают действующее или среднее значение тока, в то время как для оценки превышения допустимого уровня тока требуется его мгновенное значение. Отсюда возникает потребность в определенного рода сигнализаторе превышения заданного уровня тока.
Простейшим решением является включение в цепь катушки Lk, подключенной к источнику Uп, дополнительного резистора (рисунок 1), который, по сути, будет являться датчиком тока, и падение напряжения UR на котором согласно закону Ома будет пропорционально протекающему через него току [3]:
 . (5)
. (5)
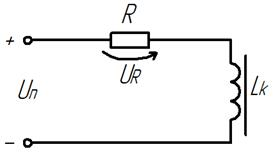
Рис. 1. Схема включения измерительного резистора.
Напряжение UR можно использовать для включения сигнализирующего светодиода VD, подключенного параллельно резистору R через добавочный резистор Rд (рисунок 2).
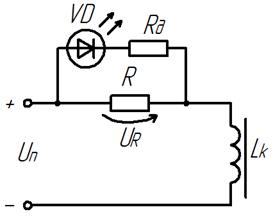
Рис. 2. Схема включения сигнализирующего светодиода
До тех пор, пока напряжение UR будет меньше порогового напряжения U0 светодиода, ток в цепи VD — Rд протекать не будет. Как только ток через R достигнет значения, при котором выполнится условие UR = U0, светодиод откроется и загорится, сигнализируя о превышении допустимого тока.
Для выбора сопротивления резистора R необходимо задаться значениями тока срабатывания Iср и напряжения UR, необходимого для включения светодиода. Тогда по формуле 5 получим:  . Мощность Р этого резистора должна быть не менее
. Мощность Р этого резистора должна быть не менее  .
.
Резистор Rд должен обеспечивать прямой ток IVD через светодиод достаточный для его яркого свечения. Сопротивление Rд определяется как  . Для большинства маломощных светодиодов достаточно тока 15–20 мА.
. Для большинства маломощных светодиодов достаточно тока 15–20 мА.
Кроме того необходимо защитить светодиод от обратного напряжения, которое может возникнуть при работе электромагнита. Для этого достаточно параллельно ему во встречном направлении подключить шунтирующий диод VDш (рисунок 3) с обратным напряжением не менее 1,4∙Uп.
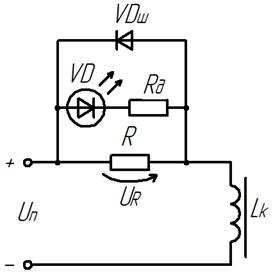
Рис. 3. Схема подключения шунтирующего диода
Кроме световой сигнализации, дополнительно может быть использована звуковая. Схема в этом случае потребует некоторой доработки и введения дополнительных элементов. Вместо светодиода VD в схему включается диодно-транзисторный оптрон U1, передающий сигнал из силовой цепи в цепь сигнализации, осуществляя дополнительно гальваническую развязку. Транзистор оптрона является ключом, коммутирующим нагрузку, которой служат параллельно подключенные светодиод VD1 и генератор звуковой частоты ГЗЧ (рисунок 4).
Работа схемы аналогична предыдущему варианту. Когда ток в катушке достигнет значения Iср, падение напряжения на резисторе R вызовет открытие диода оптрона и протекание через него тока. За счет светового потока транзистор на вторичной стороне оптрона откроется и подключит ГЗЧ и VD1 к источнику питания Uп.у. Нагрузкой ГЗЧ может быть динамическая головка или пьезоизлучатель. Резистор R1 ограничивает ток через VD1. Его сопротивление определяется как  , где IVD1 = (15÷20) мА — ток через диод VD1. За счет быстродействия полупроводниковых элементов система своевременно реагирует на превышение тока.
, где IVD1 = (15÷20) мА — ток через диод VD1. За счет быстродействия полупроводниковых элементов система своевременно реагирует на превышение тока.
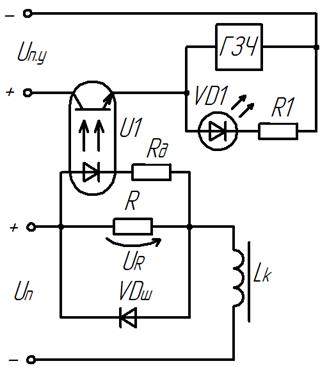
Рис. 4. Схема с использованием световой и звуковой сигнализации
Однако стоит отметить, что применение подобных схем целесообразно при значении тока в катушках не больше 5–6 А, потому как c увеличением тока сильно увеличиваются тепловые потери в резисторе R, а также затрудняется его подбор. Для более мощных электромагнитов можно использовать специальные неконтактные датчики, основанные, например, на эффекте Холла [3]. Представленная же схема в принципе может использоваться в любом устройстве, работающем на постоянном токе и требующем контроля значения этого тока.
Несмотря на то, что процессы, протекающие в электромагните, лежат в диапазоне десятков-сотен миллисекунд, энергия, преобразуемая при работе из электрической в механическую, весьма значительна, а потери этой энергии будут приводить к нагреву катушек, которые, учитывая конструкцию длинноходового электромагнита, не смогу рассеять эту энергию в окружающую среду. Поэтому стоит уделить повышенное внимание расчету и отладке устройства, не допуская его работы в критических режимах. При проектировании не стоит пренебрегать математическим моделированием. Современные САПР позволяют достаточно точно рассчитать и смоделировать работу практически любой системы, и электромагнита в частности. При грамотном моделировании можно избежать множества ошибок, возникающих при реализации готового устройства.
Литература:
1. Технические науки в России и за рубежом: материалы IV Междунар науч. конф. (г.Москва, январь 2015 г.). — М.: Буки-Веди, 2015. — 140 c. — ISBN 978–5-4465–0596–8.
2. Зорохович А. Е., Калинин В. К. Электротехника с основами промышленной электроники. — М.: «Высшая школа», 1975. — 432 с.: ил.
3. Уильямс Б. Силовая электроника: приборы, применение, управление. Справочное пособие: Пер. с англ. — М.: Энергоатомиздат, 1993. — 240 с.: ил.




