




Применение датчиков положения ротора для создание вращающего момента вентильного электродвигателя

Автор: Нурмагамбетов Анарбек Адиржанович
Рубрика: 4. Электротехника
Опубликовано в
III международная научная конференция «Технические науки: теория и практика» (Чита, апрель 2016)
Дата публикации: 04.04.2016
Статья просмотрена: 4653 раза
Библиографическое описание:
Нурмагамбетов, А. А. Применение датчиков положения ротора для создание вращающего момента вентильного электродвигателя / А. А. Нурмагамбетов. — Текст : непосредственный // Технические науки: теория и практика : материалы III Междунар. науч. конф. (г. Чита, апрель 2016 г.). — Чита : Издательство Молодой ученый, 2016. — С. 63-67. — URL: https://moluch.ru/conf/tech/archive/165/10221/ (дата обращения: 24.04.2025).
На сегодняшний день разработка и исследование электромеханических систем с бесконтактными двигателями постоянного тока в качестве объекта управления преобладает все большее значение, что характерно существующими преимуществами по сроку службы, особенностью работы в суровых условиях эксплуатации, универсальностью регулировочных качеств, а также достаточной легкостью в управлении. Разнообразие имеющих и разрабатываемых бесконтактных двигателей способствовала за собой появление огромного числа разных схем управления этими двигателями.
Необходимо отметить, что основное внимание исследователей сосредоточено на решении основных вопросов по построения отдельных узлов бесконтактных двигателей постоянного тока и их конструктивного усовершенствования. Условно меньшее количество работ посвящено аспектом по проектированию совершенно новых универсальных алгоритмов и средств управления электромеханическими системами с применением бесконтактных двигателей постоянного тока, направленных на улучшение их энергетических показателей.
Переключение фаз статора должно производиться при определенных, согласованных с ними, положениях ротора. Поэтому на валу ЭД обычно располагается датчик положения ротора (ДПР), формирующий определенны сигналы которые используются логическое устройства (ЛУ) для формирования команд управления полупроводниковым коммутатором (ПК).
Отличие вентильного двигателя от синхронного электродвигателя состоит в том, что частота поля статора в нем изменяема, а определяется частотой вращения ротора частотой сигналов датчика положения ротора, используемых для управления полупроводниковым коммутатором, определяется частотой вращения ротора. Поэтому вентильный двигатель можно изучать как синхронный электродвигатель с переменной частотой питания статорных обмоток, аналогично частоте вращения ротора. Тем самым, поле статора вынужденно по сигналам датчика положение ротора одновременно вращается с ротором, что дает возможность в теоретическом плане для изучения вентильного двигателя использовать теорию двух реакций, при исследовании синхронных электродвигателей обычной конструкции. В то же время происходящие действия и механическая характеристика вентильного двигателя такие же, как у обычных коллекторно-щеточных двигателей постоянного тока, следовая этому средние за период параметры вентильных двигателей могут быть достаточно точно охарактеризовать их уравнениями. Распределение тока в фазах электродвигателя должны осуществляться в согласованных с силовым магнитом положениях. Необходимо на валу электродвигателя расположить элементы датчика положения ротора, фиксирующие угловые положения ротора электродвигателя и взаимное расположение магнита ротора и обмоток статора. Возможны также и бездатчиковые схемы управления вентильными двигателями с использованием для формирования сигналов о положении ротора моментов прохождения через нуль противо-эдс незапутанных в момент измерений фаз в рабочем режиме в каждый момент времени запутаны только 2 фазы. Датчик положения ротора может быть реализован различными способами: с использованием эффекта Холла, оптическими или индукционными методами. Рассмотрим сначала индукционный метод: обмотки (L) датчика положения ротора намотаны на ферритовые кольца, расположенные на статоре электродвигателя, образуя дроссели (рис. 1, а). Через сопротивление R они запутаны от задающего генератора (ЗГ) частотой f=100кГц. На статоре они расположены под углом 120° друг к другу. Сигнальный двухполюсный магнит дважды за один оборот смещает рабочую точку дросселя в зону насыщения (рис.1, б) уменьшая тем самым его индуктивное сопротивление практически до нуля. Если магнит располагается к обмотке дросселя боковой поверхностью, то рабочая точка возвращается в центр характеристики, индуктивное сопротивление дросселя возрастает, на выходе детектора датчика положение ротора появляется напряжение логическая единица в виде сигналов ДА, ДВ, ДС. За один оборот ротора 360° геометрических период логического сигнала на выходе фильтра составит 720° электрических (рис. 2).
Применение датчиков Холла, вместо индукционных, значительно сокращает электронные затраты, позволяя непосредственно получить выходной сигнал в логической форме, минуя операцию детектирования (рис. 3). На выходе датчика Холла по мере прохождения под ним магнита на клеммах 2–3 датчиков Д1...Д3 появляется переменное напряжение с частотой, равной частоте вращения магнита очень низкого уровня — положительной полярности (55–70) мВ и отрицательной полярности (70–85) мВ.
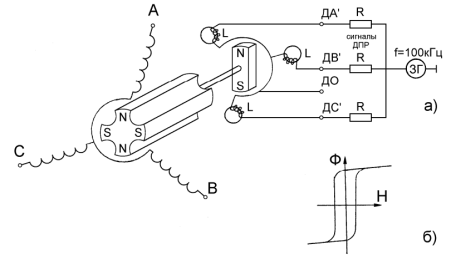
Рис. 1. Схематичное изображение силовой и сигнальной части вентильного двигателя
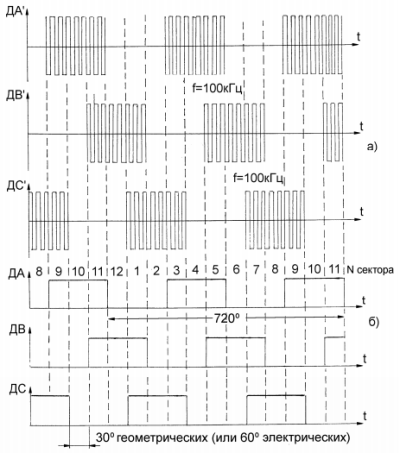
Рис. 2. Сигналы индуктивных датчиков положения ротора
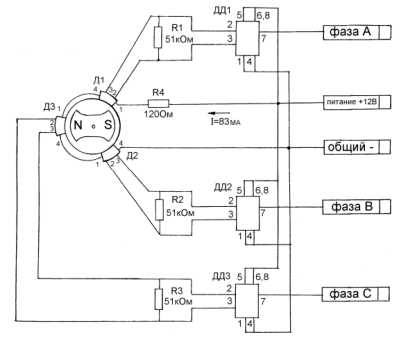
Рис. 3. Формирование сигнала о скорости с помощью датчиков Холла
Применение датчиков Холла позволяет использовать вместо расщепленного биполярного монополярное питание, что сокращает и габариты источника питания.
Датчики Холла, компараторы, резисторы устанавливаются непосредственно на корпус датчика положения ротора. Контакты питания +12В, общий, фазы А, В, С выводятся через отдельный штепсельный разъем. При использовании датчиков Холла сигналы показаны на (рис. 4), а связь сигналов и границ секторов, где происходит коммутация. (рис. 5) Если при использовании индукционных датчиков коммутация производилась через 30°, то при использовании датчиков Холла — через 60°, т. е. силовой магнит и датчики Холла должны быть ориентированы взаимно таким образом, чтобы линии переключения (рис. 3) проходили через 15° и 75°. При этом пульсация момента будет несколько больше, а число секторов сократится вдвое (рис. 4 и 5).
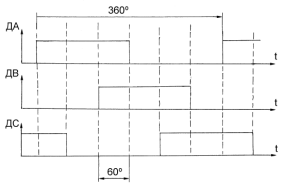
Рис. 4. Сигналы датчика положения ротора при использовании датчиков Холла
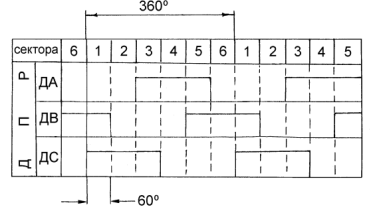
Рис. 5. Связь сигналов датчика положения ротора и границ секторов при использовании датчиков Холла
Применение датчиков положения ротора для создание вращающего момента вентильного электродвигателя и его моментных характеристик можно сделать дополнительно следующие выводы, которые будут полезны для разработки алгоритма управления полупроводниковым коммутатором:
1. Магнитное поле, образованное силовым магнитом и магнитное поле, образованное статорными обмотками, представляют собой фигуры в виде двух вращающихся крестов: первый вращается плавно, второй — скачками, через 30° геометрических.
2. Для осуществления реверса в двигательном режиме магнитный поток и ток обмоток якоря следует повернуть в обратную сторону, в алгоритме программы управления знак индекса ключа изменить на противоположный. В режиме динамического торможения алгоритм программы для правого и левого направлений вращения неизменен.
3. Моменты коммутации ключей силового моста при рассогласовании магнитных потоков, создаваемых с помощью обмоток статора и силовым магнитом (30° и 60°), должны определяться с помощью датчика положения ротора.
Литература:
- Баранов В. К. Формирователь угла опережения фазы для бесконтактного двигателя постоянного тока // Электронная техника в автоматике, Вып. 16: Сб. статей. — М.: Радио и связь, 1985. — С. 226.
- Бут Д. А. Бесконтактные электрические машины: Учебное пособие. — М.: Высшая школа, 1990. — 416 с.
- Вентильные электродвигатели малой мощности для промышленных роботов / Под ред. В. Д. Косулина. — Л., 1988. — 146 с.
- Двигатели постоянного тока с полупроводниковыми коммутаторами. — Л.: Наука, 1972. — 170 с.




