




Разработка КИХ-фильтра с использованием распределенной арифметической архитектуры

Автор: Карбушов Чингис Сергеевич
Рубрика: 2. Электроника, радиотехника и связь
Опубликовано в
Дата публикации: 23.06.2017
Статья просмотрена: 1317 раз
Библиографическое описание:
Карбушов, Ч. С. Разработка КИХ-фильтра с использованием распределенной арифметической архитектуры / Ч. С. Карбушов. — Текст : непосредственный // Технические науки: проблемы и перспективы : материалы V Междунар. науч. конф. (г. Санкт-Петербург, июль 2017 г.). — Санкт-Петербург : Свое издательство, 2017. — С. 28-32. — URL: https://moluch.ru/conf/tech/archive/231/12682/ (дата обращения: 03.04.2025).
Введение
Сигнал — это функция независимой переменной, которая содержит информацию. Среди методов обработки сигналов существуют аналоговая обработка сигналов и цифровая обработка сигналов. В обработке аналоговых сигналов присутствуют как входные, так и выходные непрерывные сигналы, а в обработке цифровых сигналов вход и выход представляют собой дискретные сигналы. Так как цифровые приборы в наше время очень широко распространены, то обработка цифровых сигналов очень востребована. Обрабатывая сигнал нам нужно удалить шум от информации и фильтр как раз помогает с этой задачей. Он представляет из себя частотно-избирательную сеть, которая модифицирует входной сигнал для облегчения дальнейшей обработки этого сигнала. В цепи обработки сигналов фильтр — это устройство или алгоритм, который удаляет части сигнала. Он выбирает, подавлять или модифицировать определенные частотные составляющие сигнала, либо для уменьшения шума, либо для формирования спектра.
Существуют два типа фильтров: аналоговые фильтры и цифровые. Аналоговый фильтр работает с напряжением, тогда как цифровой фильтр работает с дискретными сигналами. У цифровых фильтров лучшее соотношение сигнал/шум, лучшая воспроизводимость, и они выполняют бесшумные математические операции. Среди цифровых фильтров есть два наиболее распространенных, это фильтр с конечной импульсной характеристикой (КИХ) и фильтр с бесконечной импульсной характеристикой (БИХ). КИХ фильтр по своей природе является нерекурсивным а БИХ рекурсивным. КИХ-фильтр — это фильтр, импульсная характеристика которого или ответ на любой вход с конечной длиной, имеет конечную длительность, так как он оканчивается на ноль за конечное время. Фильтры БИХ имеют внутреннюю обратную связь и могут продолжать отвечать в течение неопределенного срока. КИХ-фильтр может использоваться для реализации практически любого вида частотной характеристики в цифровом виде и реализуется с помощью умножителей, сумматоров и элементов задержки.
Как уже было ранее сказано, цифровая обработка сигналов имеет широкий спектр применений. Она широко используются в обработке мультимедийных аудиосигналов, из которых удаляется шум. В цифровой обработке сигналов цифровые фильтры являются важными элементами. Проектирование цифрового фильтра — это процесс вычисления соответствующих коэффициентов фильтра и порядка цифрового фильтра. Из-за его стабильности предпочтительно использовать КИХ-фильтры. Основное представление КИХ-фильтра дается формулой (1).
![]() (1)
(1)
где y(n) — выходной отклик, x(n) — входной сигнал и представляет коэффициенты фильтра для КИХ-фильтра порядка M. Прямая реализация такого КИХ-фильтра показана на рис. 1.
В представлении прямой формы КИХ-фильтр может быть реализован с использованием сумматоров, умножителей и элементов задержки. Но умножители ограничивают скорость работы всей схемы. Для решения данной проблемы, мы можем заменить множители на сдвиговые регистры с сумматорами, что в сумме из себя представляют ускоренный умножитель, в котором набор констант (здесь h0, h1,...) умножается на переменную x(n). Но недостаток в такой замене заключается в том, что увеличение сложности схемы и производительности трудно предсказать. Таким образом, мы переходим к другой архитектуре, называемой распределенной арифметикой, которая представляет собой архитектуру с меньшим множителем. Распределенная арифметика использует таблицы поиска, элементы задержки и накопители. Таким образом, он увеличивает скорость процесса фильтрации и потребляет меньше площади и, следовательно, экономит ресурсы.
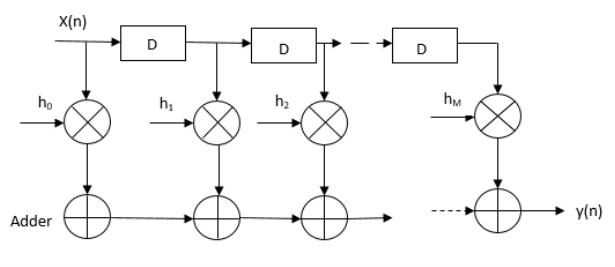
Рис. 1. Прямое представление КИХ-фильтра порядка M
Планируемая работа
Для того чтобы сделать расчеты умножения с накоплением более эффективными будем использовать распределенную арифметику. Данный метод носит последовательный характер. Распределенная арифметика подходит тогда, когда количество элементов в векторе почти такое же, как размер слова. В распределенной арифметике, просмотр ROM может заменить явный процесс умножения. Таким образом, мы можем эффективно внедрить КИХ-фильтр в ПЛИС. На рис.2 показана базовая блок-схема структуры фильтра КИХ с использованием распределенной арифметики.
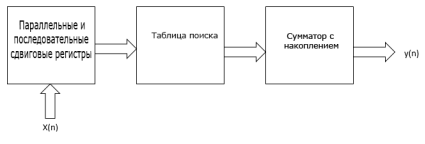
Рис. 2. Базовая блок-схема структуры фильтра КИХ с использованием РА
Он включает в себя три блока — параллельные и последовательные регистры сдвига, таблицу поиска и сумматоры с накопителем. Здесь x(n) — входной сигнал, а y(n) — выходной сигнал. Выходной отклик линейного, не зависящего от времени фильтра в любое дискретное время определяется формулой (2)
![]() (2)
(2)
Пусть Xk будет N — размерное число представленное в дополнительном коде. Его вид будет таким {bk0, bk1, bk2,......, bk(N-1)} где bk0 это бит который определяет знак числа (если он равен 1 то число отрицательное, если 0 то положительное). Таким образом Xk можно выразить в виде формулы (3)
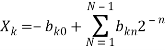 (3)
(3)
Подставив 3-ю формулу во 2-ю и решив ее, мы получим формулу (4)
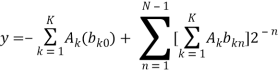 (4)
(4)
В таблице № 1 показано, как простая таблица поиска для распределенной арифметики использует 3 коэффициента A0, A1, A2. Соответствующее значение выбирается на основе выходных значений сдвигового регистра.
Результаты
В итоге с помощью Xilinx ISE 14.7 был разработан КИХ-фильтр с использованием распределенной арифметики. Программирование выполнялось для ПЛИС Spartan 3E-1200 на языке VHDL. Результаты выходного сигнала показаны на рисунке 3.
Таблица 1
Таблица поиска для трех коэффициентов
|
b2b1b0 |
Значение |
|
000 |
0 |
|
001 |
A0 |
|
010 |
A1 |
|
011 |
A1 + A0 |
|
100 |
A2 |
|
101 |
A2 + A0 |
|
110 |
A2 + A1 |
|
111 |
A2 + A1+ A0 |
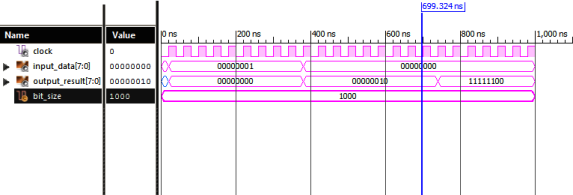
Рис. 3. Выходная характеристика КИХ-фильтра с использованием распределенной арифметики
Рис. 4. Обозначение КИХ-фильтра с использованием распределенной арифметики.
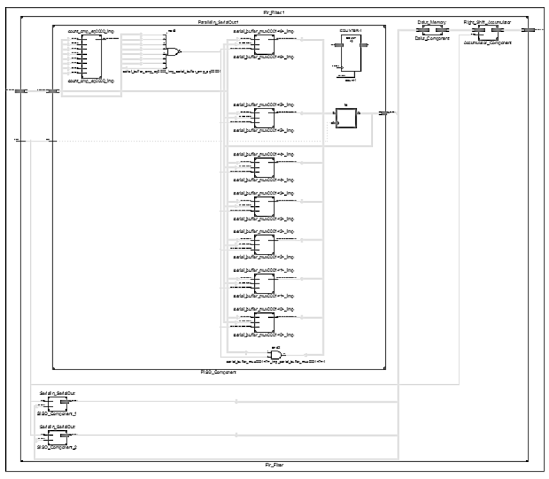
Рис. 5. Схема КИХ-фильтра с использованием распределенной арифметики.
В результате данной работы был разработан КИХ-фильтр с использованием распределенной арифметической архитектурой. Эта архитектура выделяется тем, что площадь используемого умножителя меньше обычного. Данный умножитель использует таблицы поиска, сдвиговые регистры и сумматоры с накоплением, что позволяет ему потреблять меньше ресурсов. Таким образом, распределенная арифметическая архитектура может использоваться для высокоскоростной реализации КИХ-фильтра.
Литература:
- Сергеев В. В. Расчет параллельных КИХ-фильтров для некоторых задач обработки сигналов и изображения.
- Сергеев В. В. Фролова Л. Г. Расчет параллельных КИХ-фильтров для некоторых задач обработки сигналов и изображения.
- J. M. Pak, C. K. Ahn, M. T. Lim, and M. K. Song, “Horizon group shift FIR filter: Alternative nonlinear filter using finite recent measurements,” Nov. 2014
- T. Miyata and N. Aikawa, “A design of FIR filters with variable notches considering reduction method of polynomial coefficients for real-time signal processing,” Sep. 2013.




