




Применение метода многопараметрического распознавания образов для диагностики технического состояния радиорелейного оборудования системы управления движением судов

Авторы: Бузенков Игорь Иванович, Тюфанова Анастасия Александровна, Чернышева Елена Михайловна
Рубрика: 9. Транспорт
Опубликовано в
Дата публикации: 14.10.2017
Статья просмотрена: 236 раз
Библиографическое описание:
Бузенков, И. И. Применение метода многопараметрического распознавания образов для диагностики технического состояния радиорелейного оборудования системы управления движением судов / И. И. Бузенков, А. А. Тюфанова, Е. М. Чернышева. — Текст : непосредственный // Технические науки в России и за рубежом : материалы VII Междунар. науч. конф. (г. Москва, ноябрь 2017 г.). — Москва : Буки-Веди, 2017. — С. 115-120. — URL: https://moluch.ru/conf/tech/archive/286/13067/ (дата обращения: 24.04.2025).
Рассмотрено применение метода многопараметрического распознавания образов для диагностики технического состояния радиорелейного оборудования «Ericsson MiniLink-7Е» системы управления движением судов.
Ключевые слова: радиорелейное оборудование, диагностика, техническое состояние, система управления движением судов
Сущность метода многопараметрического распознавания образов заключается в отнесении исходных данных к определенному классу с помощью выделения существенных признаков, характеризующих эти данные из общей массы несущественных данных, т. е. необходимо определить порог, характеризуемый определенной комбинацией показателей функционирования радиоэлектронного оборудования, определяющей его критическое состояние.
Основные задачи теории распознавания образов заключаются в следующем [1]:
-
Математическое описание образов — векторное, когда каждому образу x ставится в соответствие некоторый вектор
 признаков x этого образа элемент векторного пространства X, называемого пространством признаков.
признаков x этого образа элемент векторного пространства X, называемого пространством признаков.
- Выбор наиболее информативных признаков, описывающих данный образ нахождение минимального количества признаков, которые наиболее информативно описывают образы в рассматриваемой задаче распознавания.
- Описание классов распознаваемых образов — определение границ классов, которые могут быть заданы на этапе разработки системы распознавания или система сама должна их найти в процессе своей работы.
- Нахождение оптимальных решающих процедур (методов классификации) — соотнесение вектора признаков образа некоторому классу.
- Оценка достоверности классификации образов, которая необходима, чтобы лицо (или техническая система), принимающее решение, связанное с отнесением образа тому или иному классу, могло оценить величину потерь, связанных с неправильной классификацией.
Выделим три основных типа характеристик-признаков:
- Физические характеристики (например, показания, снятые с датчиков) могут быть детерминированными и вероятностными. Их необходимо описывать с помощью векторов и обрабатывать как элементы векторного пространства.
- Качественные характеристики — эти характеристики можно описывать с помощью лингвистических переменных методами теории нечетких множеств.
- Структурные характеристики применяют для описания изображений сложных объектов. При описании структурных характеристик применяется некоторый формальный язык (например, теория графов).
Рассмотрим суть метода диагностики с помощью теории многомерного распознавания образов. Сформируем эталонные оценки многомерных условных плотностей вероятности, которые содержат всю информацию, присутствующую в наблюдениях ![]() и обо всех взаимосвязях между признаками
и обо всех взаимосвязях между признаками ![]() . Оценка
. Оценка  является случайной величиной. Для принятия решения применяется статистика отношения правдоподобия, представляющая неотрицательную случайную величину, которая получается функциональным преобразованием
является случайной величиной. Для принятия решения применяется статистика отношения правдоподобия, представляющая неотрицательную случайную величину, которая получается функциональным преобразованием ![]() , которое отображает точки n-мерного пространства выборок на действительную полуось [2]:
, которое отображает точки n-мерного пространства выборок на действительную полуось [2]:
 .(1)
.(1)
Для принятия решения достаточно использовать значение одной случайной величины — статистики отношения правдоподобия ![]() , а не значения каждого элемента выборки
, а не значения каждого элемента выборки ![]() по отдельности, т. е. отношение правдоподобия несет всю статистическую информацию о классах, содержащуюся в данной выборке.
по отдельности, т. е. отношение правдоподобия несет всю статистическую информацию о классах, содержащуюся в данной выборке.
Пусть на вход распознающей системы поступают многомерные (векторные) наблюдения, принадлежащие одному из двух состояний S1 и S2, которые отличаются своими неизвестными векторами средних ![]() и
и ![]() и ковариационными матрицами А1 и А2. Оценки неизвестных векторов средних
и ковариационными матрицами А1 и А2. Оценки неизвестных векторов средних ![]() и
и ![]() определяются с помощью выражений [2]:
определяются с помощью выражений [2]:
 ,(2)
,(2)
 . (3)
. (3)
Оценки ![]() и
и ![]() неизвестных ковариационных матриц определяются с помощью выражений [1]:
неизвестных ковариационных матриц определяются с помощью выражений [1]:
 ,(4)
,(4)
 (5)
(5)
Решающее правило будет определяться выражением:
 ,(6)
,(6)
где порог ![]() , т. к. С=1 (в связи с использованием алгоритма максимального правдоподобия) [3].
, т. к. С=1 (в связи с использованием алгоритма максимального правдоподобия) [3].
Вероятности ошибок многомерного распознавания состояний определяются с помощью выражения:
 ,(7)
,(7)
где F(x) — табулированный интеграл Лапласа; ![]() и
и ![]() выражаются через объемы контрольных n и обучающих m выборок по формулам:
выражаются через объемы контрольных n и обучающих m выборок по формулам:
![]() ;(8)
;(8)
Рассмотрим применение данного метода на примере радиорелейного оборудования «Ericsson MiniLink-7Е», эксплуатируемого в системе управления движением судов (СУДС) порта Новороссийск.
В качестве основных параметров, характеризующих работу радиорелейного оборудования, выберем следующие показатели: рабочая частота, чувствительность приемника и мощность излучения.
Параметры надежно функционирующего радиооборудования обозначим ![]() . Реальные параметры исследуемого оборудования x. Значения параметров приведены в таблице 1. Значения параметров, при которых наступает отказ оборудования
. Реальные параметры исследуемого оборудования x. Значения параметров приведены в таблице 1. Значения параметров, при которых наступает отказ оборудования ![]() приведены в таблице 2 [3].
приведены в таблице 2 [3].
Таблица 1
Параметры надежно функционирующего иисследуемого оборудования
|
Параметры |
Параметры надежно функционирующего оборудования |
Параметры исследуемого оборудования x |
||||
|
|
|
|
|
|
||
|
Рабочая частота, ГГц |
7,1 |
7,3 |
7,4 |
7,5 |
7,6 |
7.3 |
|
Мощность излучения, дБВт |
2 |
5 |
10 |
17 |
20 |
5 |
|
Чувствительность приемника, дБВт |
78 |
79 |
80 |
78 |
79 |
78 |
Таблица 2
Параметры, при которых наступает отказ системы
|
Параметры |
Параметры оборудования, вкотором произошел отказ |
||||
|
|
|
|
|
|
|
|
Рабочая частота, ГГц |
8,1 |
7,8 |
7,7 |
7,9 |
7,8 |
|
Мощность излучения, дБВт |
28 |
29 |
28 |
29 |
28 |
|
Чувствительность приемника, дБВт |
82 |
83 |
84 |
82 |
84 |
Для решения задачи диагностики технического состояния радиорелейного оборудования «Ericsson MiniLink-7Е» составим программу в математическом редакторе MathCAD (рисунок 1).
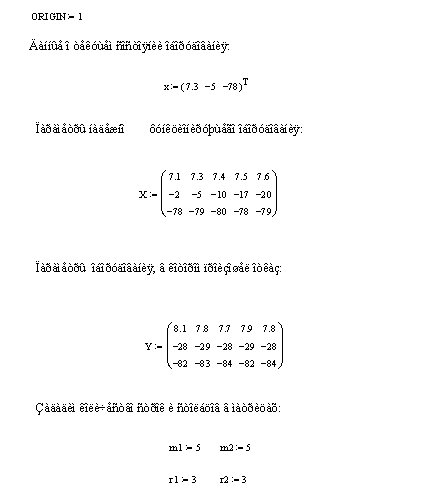
Рис. 1. Программа диагностики технического состояния радиорелейного оборудования методом многопараметрического распознавания образов
Найдем параметр L, идентифицирующий принадлежность исследуемого оборудования к статистике правдоподобия (рисунок 2).
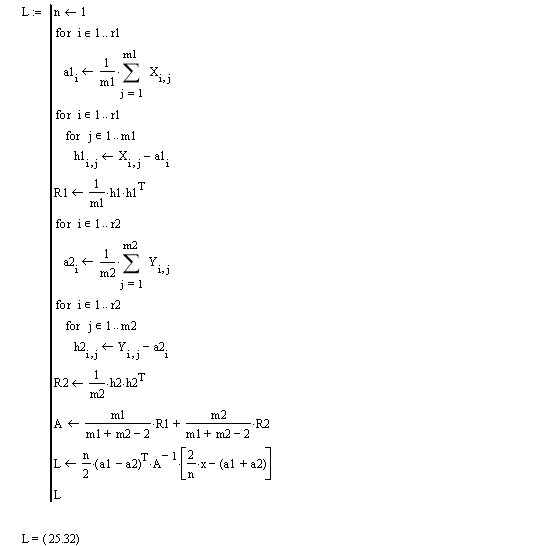
Рис. 2. Программа нахождения параметра L, идентифицирующего принадлежность исследуемого оборудования к статистике правдоподобия
Определим вероятность достоверности результатов (D) проведенной диагностики технического состояния радиорелейного оборудования (рисунок 3).
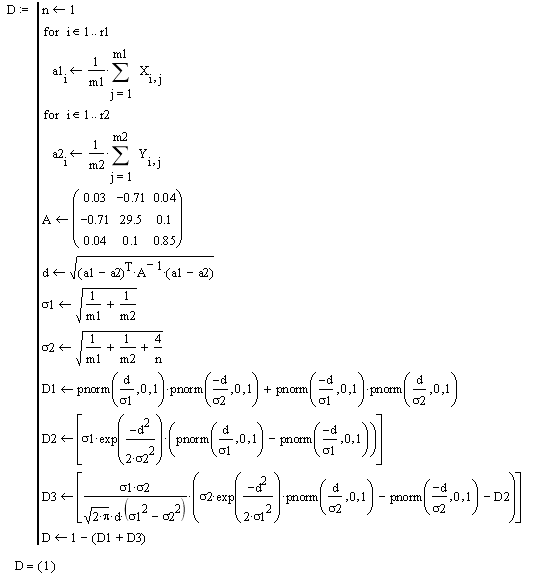
Рис. 3. Программа оопределения вероятности достоверности результатов (D) проведенной диагностики технического состояния радиорелейного оборудования
Результаты проведенных расчетов (параметр принадлежности ![]() ) показывают, что исследуемое радиорелейное оборудование «Ericsson MiniLink-7Е» относится к надежно функционирующим. При этом полученный результат справедлив с достоверностью
) показывают, что исследуемое радиорелейное оборудование «Ericsson MiniLink-7Е» относится к надежно функционирующим. При этом полученный результат справедлив с достоверностью ![]() .
.
Т.о., метод многопараметрического распознавания образов можно использовать для диагностики технического сотояния радиорелейного оборудования СУДС и на основании полученных результатов планировать сроки проведения технического обслуживания для корректировки параметров оборудования, достигших критических значений, что позволит предотвращать его отказы и повысить эксплуатационную надежность системы.
Литература:
- Стецюк, А. Е. Основы технической диагностики. Теория распознавания: учеб. пособие / А. Е. Стецюк, Я. Ю. Бобровников. — Хабаровск: ДВГУПС, 2012. — 69 с.
- Тюфанова, А. А. Составные состояния коэффициента готовности как количественного показателя эксплуатационной надежности технических средств системы управления движением судов//Транспортное дело России № 4(125). — М: Морские вести России, 2016.
- Тюфанова, А. А. Методика анализа эксплуатационной надежности технических средств системы управления движением судов на примере порта Новороссийск/ А. А. Тюфанова. — Казань: Изд-во «Бук», 2015. — 104 C.
Ключевые слова
диагностика, техническое состояние, система управления движением судов, радиорелейное оборудованиеПохожие статьи
Автономная система ориентирования беспилотного летательного аппарата: состав и схема функционирования в формате 3D
Для решения задач мониторинга территорий и объектов, как в военной, так и в гражданской сфере применяются сверхлегкие беспилотные летательные аппараты. Главным критерием гарантии выполнения поставленной задачи является точность его позиционирования в...
Судовождение в условиях ограниченной видимости
Статья посвящена анализу современных технологий и методов обеспечения безопасности судоходства в условиях ограниченной видимости. Рассматриваются ключевые аспекты использования радиолокационных станций (РЛС), автоматической идентификационной системы ...
Разработка автоматизированной системы позиционирования измерительного элемента для средств контроля и диагностики бортовой радиоэлектронной аппаратуры
В статье рассмотрен вопрос автоматизации системы позиционирования измерительного элемента для средств контроля и диагностики бортовой радиоэлектронной аппаратуры. В качестве измерительного элемента предложено использование вибродатчика индукционного ...
Направления и перспективы развития судовых энергетических установок безэкипажных судов
Рассмотрены варианты технических решений, которые могут применяться в судовых энергетических установках безэкипажных судов. Отмечена важность использования комплексных систем управления и мониторинга механизмов машинного отделения.
Анализ необходимости применения средств моделирования при проектировании регистратора климатических параметров
В данной работе рассматриваются вопросы применения информационных технологий проектирования электронных изделий при проектировании регистратора климатических параметров. Дана характеристика области применения проектируемого устройства. Обосновано при...
Современное имитационное оборудование для автоматизированных систем управления
Приведены основные понятия имитационного моделирования. Рассмотрено имитационное оборудование на примере устройства ARP670. Указаны технические характеристики устройства. Рассмотрена схема применение имитационного оборудования ARP670 для взаимодейств...
Обзор мобильных роботов, использующих бортовые системы навигации для автономного планирования пути к заданной цели
Проведён краткий обзор мобильных роботов, используемых в сфере обеспечения безопасности, в сельском хозяйстве и в сфере обслуживания, таких как: LAURON 5, iC Hexapod, BoniRob и BigDog. Сформулированы главные принципы организации системы управления дв...
Повышение качества работы вычислительной цифровой системы обработки сигналов спутниковых радионавигационных систем
В интересах определения требования к объёму памяти и быстродействию цифровой системы обработки сигналов спутниковых радионавигационных систем разработано исследование определения количества выполняемых операций в алгоритме управления беспилотным лета...
Методика измерения параметров на координатно-измерительной машине GLOBAL CLASSIC 05.05.05
Измерение сложнопрофильных деталей на предприятиях машиностроения без использования современного оборудования практически невозможно. Модернизация предприятий направлена не только на приобретение современного измерительного оборудования, но и на подг...
Разработка автоматизированного стенда паспортизации пьезоэлектрических преобразователей
Данная статья посвящена перспективному направлению использования роботов манипуляторов для автоматизации процесса паспортизации ультразвуковых пьезоэлектрических преобразователей. Основное внимание уделено возможности использования робота-манипулятор...
Похожие статьи
Автономная система ориентирования беспилотного летательного аппарата: состав и схема функционирования в формате 3D
Для решения задач мониторинга территорий и объектов, как в военной, так и в гражданской сфере применяются сверхлегкие беспилотные летательные аппараты. Главным критерием гарантии выполнения поставленной задачи является точность его позиционирования в...
Судовождение в условиях ограниченной видимости
Статья посвящена анализу современных технологий и методов обеспечения безопасности судоходства в условиях ограниченной видимости. Рассматриваются ключевые аспекты использования радиолокационных станций (РЛС), автоматической идентификационной системы ...
Разработка автоматизированной системы позиционирования измерительного элемента для средств контроля и диагностики бортовой радиоэлектронной аппаратуры
В статье рассмотрен вопрос автоматизации системы позиционирования измерительного элемента для средств контроля и диагностики бортовой радиоэлектронной аппаратуры. В качестве измерительного элемента предложено использование вибродатчика индукционного ...
Направления и перспективы развития судовых энергетических установок безэкипажных судов
Рассмотрены варианты технических решений, которые могут применяться в судовых энергетических установках безэкипажных судов. Отмечена важность использования комплексных систем управления и мониторинга механизмов машинного отделения.
Анализ необходимости применения средств моделирования при проектировании регистратора климатических параметров
В данной работе рассматриваются вопросы применения информационных технологий проектирования электронных изделий при проектировании регистратора климатических параметров. Дана характеристика области применения проектируемого устройства. Обосновано при...
Современное имитационное оборудование для автоматизированных систем управления
Приведены основные понятия имитационного моделирования. Рассмотрено имитационное оборудование на примере устройства ARP670. Указаны технические характеристики устройства. Рассмотрена схема применение имитационного оборудования ARP670 для взаимодейств...
Обзор мобильных роботов, использующих бортовые системы навигации для автономного планирования пути к заданной цели
Проведён краткий обзор мобильных роботов, используемых в сфере обеспечения безопасности, в сельском хозяйстве и в сфере обслуживания, таких как: LAURON 5, iC Hexapod, BoniRob и BigDog. Сформулированы главные принципы организации системы управления дв...
Повышение качества работы вычислительной цифровой системы обработки сигналов спутниковых радионавигационных систем
В интересах определения требования к объёму памяти и быстродействию цифровой системы обработки сигналов спутниковых радионавигационных систем разработано исследование определения количества выполняемых операций в алгоритме управления беспилотным лета...
Методика измерения параметров на координатно-измерительной машине GLOBAL CLASSIC 05.05.05
Измерение сложнопрофильных деталей на предприятиях машиностроения без использования современного оборудования практически невозможно. Модернизация предприятий направлена не только на приобретение современного измерительного оборудования, но и на подг...
Разработка автоматизированного стенда паспортизации пьезоэлектрических преобразователей
Данная статья посвящена перспективному направлению использования роботов манипуляторов для автоматизации процесса паспортизации ультразвуковых пьезоэлектрических преобразователей. Основное внимание уделено возможности использования робота-манипулятор...




