




Структурные особенности построения прецизионной системы управления ветрогенератором
Авторы: Айтулина Айжан Мингожановна, Ивель Виктор Петрович, Герасимова Юлия Викторовна, Калиаскаров Нурбол Балтабаевич
Рубрика: 2. Электроника, радиотехника и связь
Опубликовано в
Дата публикации: 23.05.2019
Статья просмотрена: 638 раз
Библиографическое описание:
Айтулина, А. М. Структурные особенности построения прецизионной системы управления ветрогенератором / А. М. Айтулина, В. П. Ивель, Ю. В. Герасимова, Н. Б. Калиаскаров. — Текст : непосредственный // Технические науки в России и за рубежом : материалы VIII Междунар. науч. конф. (г. Краснодар, июнь 2019 г.). — Краснодар : Новация, 2019. — С. 17-19. — URL: https://moluch.ru/conf/tech/archive/332/15106/ (дата обращения: 26.04.2025).
Современные ветроэнергетические установки или ветротурбины — это комплекс взаимосвязанного оборудования и сооружений, которые преобразуют кинетическую энергию ветра в механическую энергию вращающегося ветроколеса, а затем в электрическую энергию.
Ветротурбины используются для зарядки аккумуляторных батарей может упоминаться как ветер зарядное устройство. Результат более чем тысячелетнего развития ветроэнергетики и современной инженерии, современных ветровых турбин изготавливаются в широком диапазоне вертикальных и горизонтальных осей типов. Общая структура ветротурбины обычно включает следующие блоки [1]:
– ветроколесо, как правило, состоящее из трех лопастей;
– управляемый редуктор;
– ветрогенератор;
– система управления включая датчики измерения скорости ветра, давления и др.
При проектировании ветроустановок надо учитывать следующие их особенности:
– для обеспечения максимальной эффективности работы ветроколеса следует изменять частоту его вращения при изменении скорости ветра, сохраняя постоянным коэффициент быстроходности, в то же время для максимально эффективной работы ветрогенератора необходима практически постоянная частота вращения;
– механические системы управления частотой вращения ветроколеса достаточно сложны и дороги. Гораздо эффективнее и дешевле управлять частотой его вращения, изменяя электрическую нагрузку ветрогенератора;
– оптимальная частота вращения ветроколеса тем меньше, чем больше его радиус, поэтому только очень малые ветроколёса (радиусом не более 2 м) удаётся соединять с генератором напрямую. При больших размерах ветроколеса приходится использовать мультипликаторы, удорожающие ветроустановку и её обслуживание. Альтернативой им могут стать многополюсные ветрогенераторы, работающие при меньших частотах вращения;
– в конструкции ветроустановки предусматривается, как правило, возможность отключения генератора от ветроколеса и вращения его от химического или механического аккумулятора энергии, поэтому систему управления ветрогенератором не связывают с работой ветроколеса. При отсутствии такой связи даже при мягком соединении генератора с ветроколесом необходимы специальные демпфирующие устройства для исключения механических ударов, перегрузок и бросков напряжений на выходе ветрогенератора [2].
Проведенные ранее обширные исследование систем управления ветровых турбин постоянной скорости показали, что значительное увеличение эффективности может быть получено при применении соответствующего контроллера (регулятора) в рамках стратегии нелинейного управления. Программа разработки подобных систем регулирования ветровым турбинам с регулируемой скоростью вращения ветрогенератора в настоящее время является предмет интенсивных исследований. Поэтому данная тема является актуальной [3]. Задачейданного исследования является разработка прецинзионой системы управления ветрогенератором. При решении поставленных задач использованы математический аппарат теории автоматического управления, методы математического моделирования. На рисунке 1 представлена структурная схема системы управления ветроэнергетической установки.
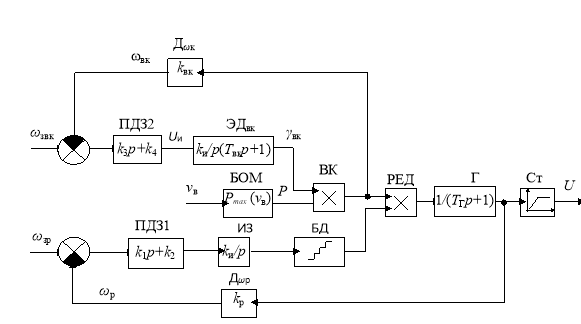
Рис. 1. Структурная схема системы управления ветрогенератором
На рисунке 1 приняты следующие обозначения: ПДЗ — пропорционально-дифференцирующие звенья; ЭДвк — электродвигатель для поворота лопастей ветроколеса; БОМ — блок определения максимального значения мощности ветроколеса; Дωр — датчик угловой скорости ротора; ИЗ — интегрирующее звено; Дωк — датчик угловой скорости ветроколеса; ВК — ветроколесо (блок умножения); БД — блок дискретизации; РЕД — редуктор (блок умножения); Г — электрогенератор; p — оператор Лапласа; Ст — стабилизатор напряжения; ωзвк — заданная угловая скорость ветроколеса; ωзр — заданная угловая скорость редуктора или электрогегенратора; ωвк — угловая скорость ветроколеса; Pmax(vв) — блок определения максимального значения мощности ветроколеса; vв — скорость ветра; P — мощность ветра; ωр — угловая скорость редуктора; γвк — угол поворота ветроколеса, U — напряжение на выходе генератора.
Устройство управления ветрогенератором включает два контура: контур управления угловой скоростью ротора ветрогенератора и вспомогательный контур стабилизации скорости ветроколеса. Основной контур включает звенья: ПДЗ1 — звено, предназначенное для форсирования процесса управления, ИЗ — блок необходимый для придания переходному процессу апериодических свойств, Дωр –цифровой датчик измерения угловой скорости ротора ветрогенератора, БД — блок, моделирующий дискретный сигнал для управления редуктором, РЕД — редуктор, представляющий собой исполнительный механизм управляющий ротором и Г — звено, моделирующее работу электрогенератора. Вспомогательный контур необходим для регулированием угла поворота лопастей ветроколеса в зависимости от текущей скорости ветра. Контур включает звенья: ПДЗ2 — звено, предназначенное для форсирования процесса управления по вспомогательному контуру, ЭДвк — звено, моделирующее работу электродвигателя для поворота лопастей ветроколеса, Pmax(vв) — блок, моделирующий внешнее воздействие как преобразователь скорости ветра в его мощность, ВК — блок умножения, на который поступают сигналы от блоков ЭДвк и Pmax(vв) и который является моделью ветроколеса. Скорость вращения ветроколеса зависит от двух параметров: угла поворота ветроколеса и скорости ветра и должна поддерживаться на заданном уровне. Передаточная функция электрогенератора служит для получения как угловой скорости ротора ωр, так и выходного напряжения электрогенератора U. Блок Ст выполняет роль стабилизатора выходного напряжения.
Разработка прецизионной системы управления ветроэнергетической установка требует комплексного подхода с учетом множества факторов, важнейшие из которых — вид генератора, режим работы ветрогенератора, система регулирования угла поворота лопастей.
Литература:
- Шингисов Б. Т. Обоснование кинематических и конструктивных параметров электропривода генератора ветроустановки // Алматы 2015 г.
- http://www.mensh.ru/articles/osobennosti-vetrogeneratorov
- Босов Е. А. Построение системы управления и диагностики генераторами ветровой электростанции // Автореферат на магистерскую диссертацию 2006 г.




