




Разработка автоматизированной системы обнаружения и идентификации транспортных средств для измерения плотности транспортного потока
Авторы: Демиденков Константин Андреевич, Мельников Игорь Игоревич
Рубрика: 1. Информатика и кибернетика
Опубликовано в
международная научная конференция «Технические науки: теория и практика» (Чита, апрель 2012)
Статья просмотрена: 1512 раз
Библиографическое описание:
Демиденков, К. А. Разработка автоматизированной системы обнаружения и идентификации транспортных средств для измерения плотности транспортного потока / К. А. Демиденков, И. И. Мельников. — Текст : непосредственный // Технические науки: теория и практика : материалы I Междунар. науч. конф. (г. Чита, апрель 2012 г.). — Чита : Издательство Молодой ученый, 2012. — С. 11-16. — URL: https://moluch.ru/conf/tech/archive/7/2200/ (дата обращения: 22.%м.2025).
В последнее десятилетие автомобильный парк Беларуси значительно вырос и продолжает увеличиваться. По данным Министерства транспорта и коммуникаций Республики Беларусь по состоянию на 01.01.2010 он насчитывал 3433 тыс. автотранспортных средств, из которых 83,6% приходилось на автомобили [8, c. 104]. За период с 2005 по 2009 гг. число автотранспортных средств возросло на 21 %, а уровень автомобилизации населения Беларуси повысился с 280 до 340 автотранспортных средств на 1 тыс. населения. Все это привело к увеличению плотности транспортного потока. Однако пропускная способность дорог остается прежней, что приводит к образованию заторов и пробок. Такая ситуация также характерна и для других стран, в частности, Республики Украины и Российской Федерации [3, с. 505]. Улучшить ситуацию может автоматизированное регулирование дорожным движением.
Для этих целей во многих странах разработаны автоматизированные системы управления дорожным движением (АСУДД) [3, с. 505-506]. Так, в Республике Беларусь разработана и внедрена в эксплуатацию автоматизированная система управления дорожным движением «Агат» [1], аналог автоматизированных систем управления дорожным движением, разработанных в Российской Федерации, и интеллектуальных транспортных систем, разработанных в США и ЕС. Все эти системы нуждаются в сборе и оперативной обработке исходных данных, в частности данных о плотности транспортного потока и его скорости.
Сбор информации, как правило, осуществляется посредствам датчиков различного типа: контактные, фотоэлектрические, ультразвуковые и магнитные [4, с. 111-113]. Они относительно дешевы, просты в установке и эксплуатации, но имеют очень ограниченный угол обзора и ряд других недостатков (низкая износостойкость, большое влияние атмосферных загрязнений и погоды, акустические помехи и др.) [4, с. 111-113]. Особое место занимают видеокамеры, или оптические датчики, которые, как правило, используются для обнаружения внештатных ситуаций на дороге. С их помощью осуществляется видеоконтроль дорожного движения, но есть и другие способы их применения, о которых будет сказано ниже.
Видеокамеры могут применяться совместно с детекторами другого типа для одновременного измерения скорости движения автомобиля и его идентификации (распознавания номера, определение класса, цвета и т.п.), как это сделано в системе «VOCORD Traffic» [7]. В ней посредствам видеокамер, установленных над участком автомагистрали, и специального программного обеспечения производится фотофиксация транспортного средства и распознавание его номерного знака, а с помощью радаров – определение его скорости.
Другая полезная возможность, которая заложена в системе видеонаблюдения за транспортным потоком – анализ его статистики (вычисление плотности и средней скорости потока и др.). Такая возможность активно используется в системе видеоконтроля «КОМКОН Traffic Control Equipment» [5]. В ней для организации видеоконтроля применяется несколько типов камер, которые могут быть установлены в соответствии с одним из нескольких возможных вариантов (см. рис. 1).
Первый тип – панорамные камеры низкого разрешения для мониторинга транспортного потока и определения нарушений. Обычно применяется одна камера на одно направление движения.
Второй тип камер – камеры высокого разрешения – применяются для фиксации номерных знаков транспортных средств. Обычно используется одна камера на две-три полосы движения.
Третий тип − роботизированная камера с возможностью масштабирования. Применяется для общего наблюдения за перекрестком. Количество таких камер определяется сложностью дорожных ситуаций, возникающих на перекрестке.
|
|
|
|
а |
б |
|
|
|
|
в |
г |
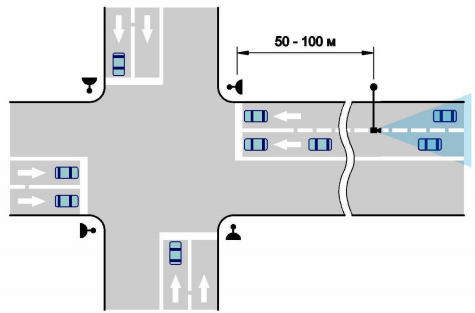
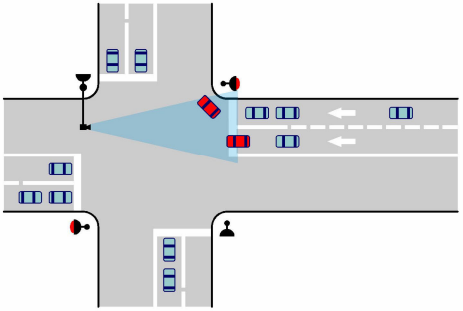

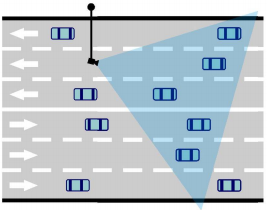
Рисунок 1 – Варианты установки камер на перекрестке и перегоне: а) установка камеры на подъезде к перекрестку; б) установка камеры на перекрестке; в) установка камеры на перегоне с захватом одного направления движения; г) установка камеры на перегоне с захватом двух направлений движения
Видеокамеры позволяют получать визуальную информацию о дорожной обстановке сразу с нескольких полос благодаря широкому углу обзора. Но обработка видеоизображения, причем не всегда высокого качества, с последующим распознаванием движущихся объектов на нем является ресурсоемкой задачей, требующей нередко специализированного и дорого оборудования.
На данный момент в городе Могилеве не внедрена никакая автоматизированная система управления дорожным движением, однако на некоторых перекрестках необходимость автоматизированного управления режимами работы светофоров стоит достаточно остро. Возникла потребность в создании относительно недорогой и простой в освоении автоматизированной системы обнаружения и идентификации транспортных средств с целью слежения за транспортными средствами и сбора информации о плотности транспортного потока и скорости ее изменения. Это позволило бы оперативно менять режимы работы светофоров на перекрестках в зависимости от интенсивности движения транспортных средств, предупреждая образование заторов.
Данная система должна не требовать дорогого специализированного оборудования, видеоконтроль должен осуществляться посредствам камер панорамного типа с низким разрешением. При этом быстродействие такой системы должно быть на уровне быстродействия аналогичных модулей в рамках существующих автоматизированных систем управления дорожным движением или систем видеоконтроля, уже применяемых в Республике Беларусь (например, АСУДД «АГАТ»), а также в Российской Федерации (например, «VOCORD Traffic») и в Республике Украина (например, «КОМКОН Traffic Control Equipment»).
Для того чтобы использовать более дешевые универсальные, а не специализированные и, как правило, более дорогие аппаратные средства, осуществляя с их помощью ресурсоемкую обработку видеоизображения за достаточно короткий промежуток времени, авторы решили разработать такую систему с применением параллельных вычислений. Для решения данной задачи можно использовать параллельные системы с архитектурой SIMD и MIMD по классификации Флинна [2, с. 97-99Воеводин, В.В. Параллельные вычисления / В.В. Воеводин, Вл.В. Воеводин. – СПб.: БХВ-Петербург, 2002. – 608 с.: ил.], а также многопоточные графические процессоры с архитектурой CUDA [9]. Сегодня бурный прогресс в области многоядерных и многопроцессорных систем позволяет распараллеливать сложные алгоритмы цифровой обработки видеоизображения. Например, разбивать изображение на области и параллельно обрабатывать каждую из них, что ускоряет процесс обработки всего изображения в целом. Таким образом, можно быстро и дешево организовывать высокопроизводительные вычислительные мощности.
Ускорить процесс распознавания можно путем, например, распределения задачи на множестве нейронных сетей [10, с. 85-87]. Распределением данных между процессами занимается особый выделенный процесс, который условно можно назвать главным процессом. После распределения данных каждый процесс выполняет работу над своим блоком данных и затем отсылает результат главному процессу, который обобщает все принятые данные и выносит решение о результате распознавания. В качестве результата распознавания главный процесс должен выбрать результат той нейронной сети, которая наиболее уверена в своем ответе.
Анализ систем обработки видеоизображения и распознавания объектов на нем, показал, что процесс обработки и анализа видеоизображения идентичен для всех подобных систем [6, с. 7-20]. Он состоит из четырех этапов: выделение переднего плана, выделение и классификация движущихся объектов, отслеживание траектории движения найденных объектов, или трекинг, распознавание и описание движения найденных объектов.
На данный момент авторы реализуют несколько возможных вариантов работы системы. На рисунке 2 показана общая схема работы системы, при которой процесс цифровой обработки видеоизображения и распознавания объектов распараллелен изначально (за основу взят кадр из презентации системы «VOCORD Traffic», как наиболее схожей по своим характеристикам с разрабатываемой системой). Кадр, приходящий с видеокамеры, разбивается главным процессом, например, на три фрагмента (по количеству полос). Данные этих фрагментов передаются трем рабочим процессам, которые параллельно осуществляют обработку видеоизображения и оперируют нейронными сетями одной и той же топологии с целью распознавания транспортных средств, появившихся в кадре.
Такая схема работы позволяет ускорить процесс распознавания транспортных средств в рамках всего кадра, но существует проблема двойного распознавания транспортного средства при его перестроении с одной полосы на другую в зоне видеонаблюдения, которая может быть решена путем использования трекинга.
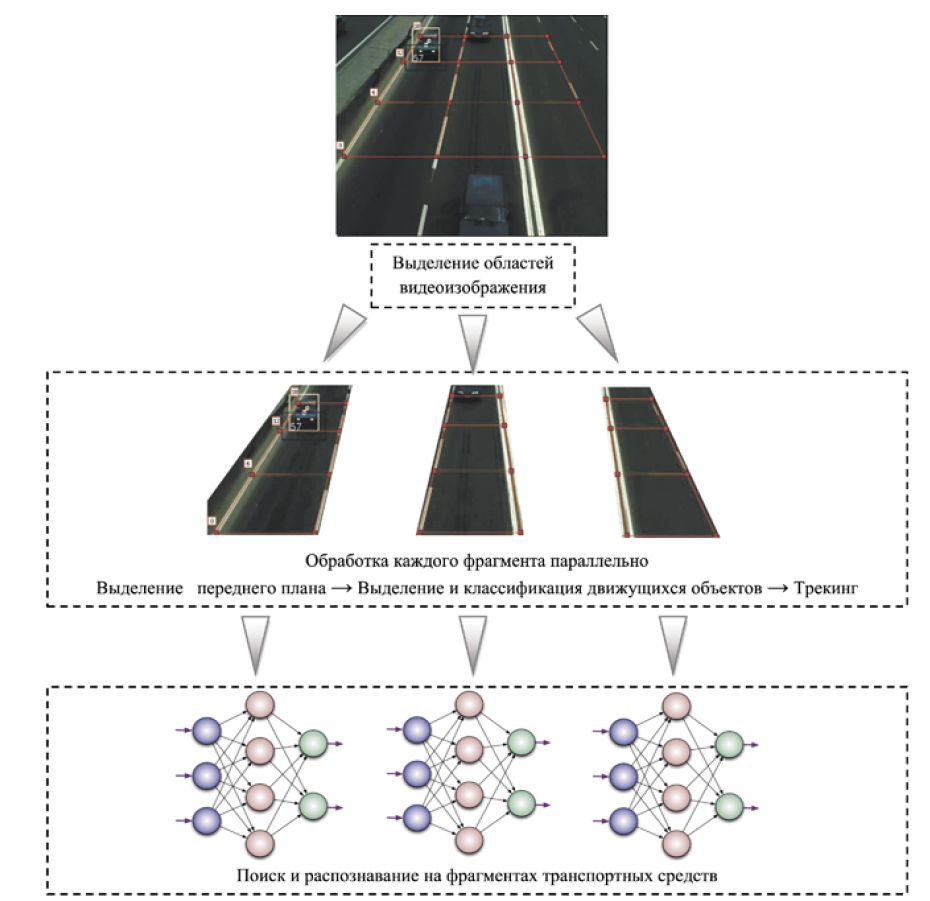
Рисунок 2 – Первый вариант общей схемы работы системы
На рисунке 3 показан другой вариант общей схемы работы системы, при которой процесс цифровой обработки видеоизображения осуществляется главным процессом, а вот поиск и распознавание объектов производится параллельно разными рабочими процессами, оперирующими разными по топологии нейронными сетями.
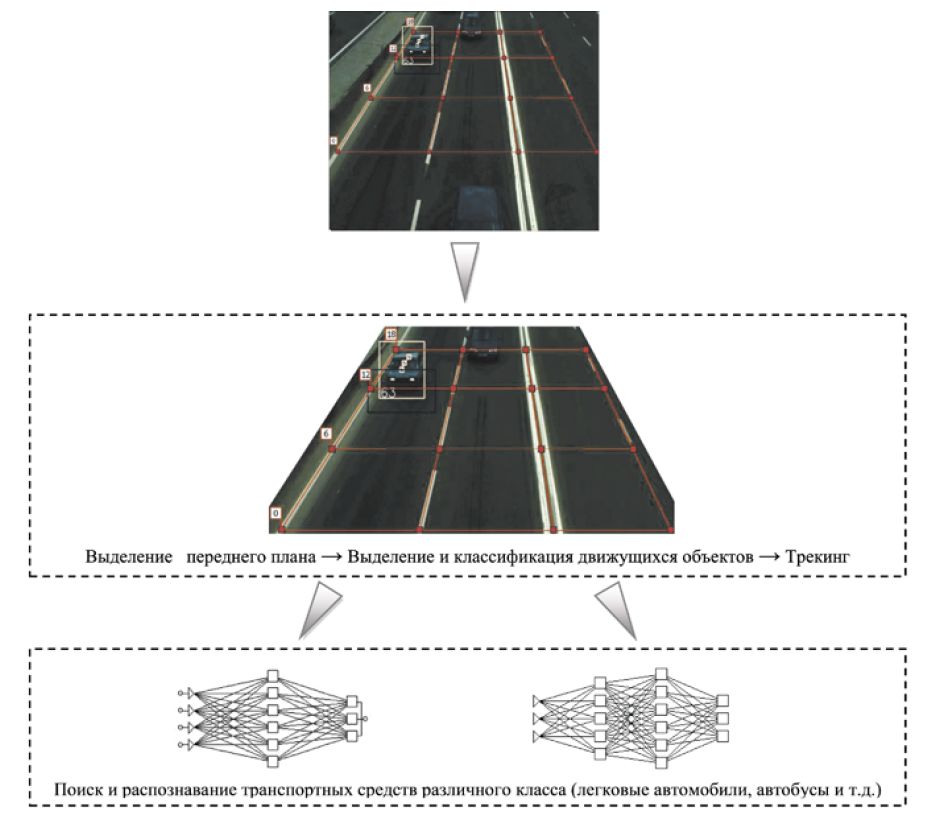
Рисунок 3 – Второй вариант общей схемы работы системы
Каждый рабочий процесс определяет, относится ли выделенный объект к его области компетенции, и если относится, то производит распознавание. В таком случае одна нейронная сеть может быть обучена с высокой точностью распознавать один класс автомобилей (например, легковые), другая – другой класс (например, грузовики определенного типа), третья – третий класс (например, автобусы) и т.д.
Разрабатывается и еще одна схема работы системы, суть которой в следующем. Как известно, построение (выделение) переднего плана является наиболее важным этапом обработки, поскольку именно он определяет дальнейшее качество системы в целом и позволяет значительно сократить объем вычислений путем обработки только тех пикселей, которые относятся к переднему плану. Существует несколько методов построения переднего плана: метод вычитания фона, вероятностные методы, методы временной разности и т.д. Каждый из них обладает своими преимуществами и недостатками. Учитывая постоянно изменяющееся состояние фона при видеонаблюдении за дорогой из-за освещенности и атмосферных явлений, существует необходимость в быстрой адаптации системы к этим изменениям. Это можно достичь путем использования различных методов обработки видеоизображения в рамках одной и той же системы в зависимости от сложившейся ситуации. В этом случае благодаря параллельным вычислениям можно осуществить обработку одного и того же кадра или фрагмента кадра разными процессами одновременно (см. рис. 4).
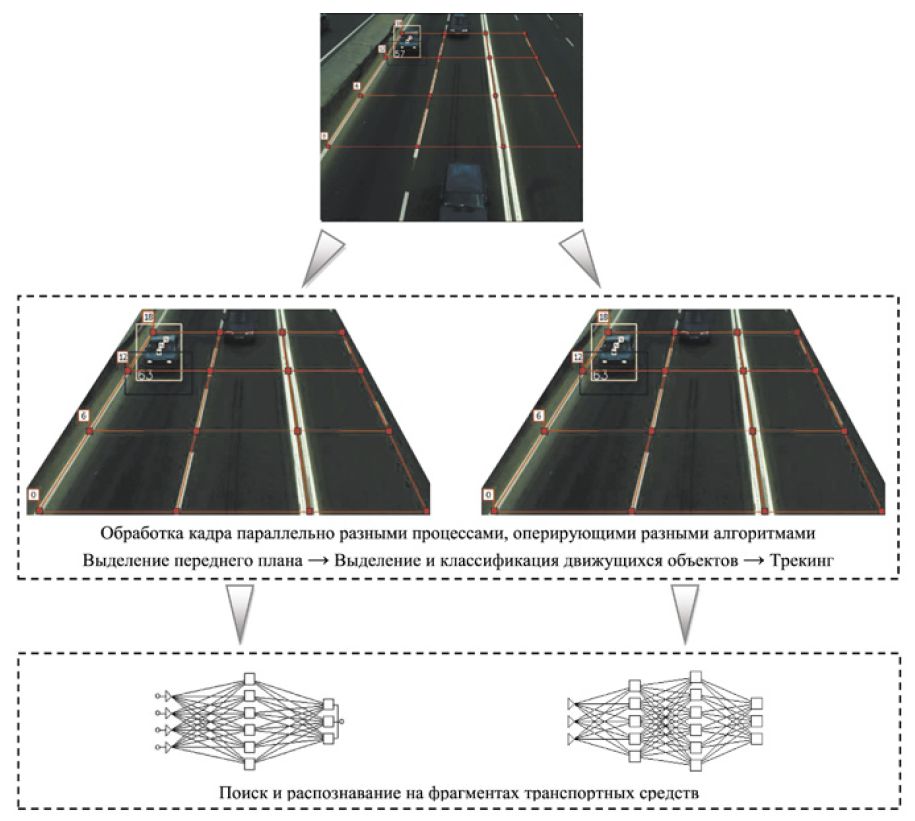
Рисунок 4 – Третий вариант общей схемы работы системы
Эти процессы будут оперировать разными алгоритмами цифровой обработки видеоизображения и нейронными сетями различной топологии. Тот процесс, который дал результат приемлемой точности быстрее всех, «выигрывает», остальные отсанавливаются. Авторы полагают, что в таком случае можно ускорить процесс адаптации системы к изменяющимся факторам внешней среды. Каждый процесс оперирует комплексом алгоритмов, которые могут давать точный результат при одних условиях внешней среды, а в других быть бесполезными. Например, метод оптического потока позволяет с высокой точностью отделить фон от переднего плана, но он чувствителен к шумам, т.е. данный алгоритм хорошо покажет себя при хорошей видимости, в то время как в худших условиях целесообразнее будет применить иной метод или группу методов (например, метод временной разности совместно с методом вычитания фона).
На данный момент авторы реализуют именно эти три возможные схемы работы системы в поисках наиболее оптимальной из них по скорости распознавания и скорости адаптации к изменяющимся факторам внешней среды (туман, ночь, смог, яркий день с хорошей видимостью и т.п.). Не исключено, что исследования приведут к выработке новых схем.
Разрабатываемая система может быть использована как независимо, так и как модуль в рамках уже существующих систем управления дорожным движением, сохраняя или даже увеличивая при этом показатели быстродействия процесса обнаружения и идентификации транспортных средств. Авторы считают также возможным использование системы и в других областях: дефектоскопия, определение объектов, находящихся перед движущимся транспортным средством и др.
Литература:
Автоматизированная система управления дорожным движением «Агат» (АСУДД «Агат») [Электронный ресурс] / АГАТ – системы управления. Режим доступа http://www.agat.by/products/transport/dd/asudd-agat/ (дата доступа 25.03.2012 г.).
Воеводин, В.В. Параллельные вычисления / В.В. Воеводин, Вл.В. Воеводин. – СПб.: БХВ-Петербург, 2002. – 608 с.: ил.
Зуев А.Л. Программный комплекс моделирования и оптимизации транспортных потоков / А.Л. Зуев, В.Н. Неспирный // Донбас-2020: перспективи розвитку очима молодих вчених: Матеріали V науково-практичної конференції ДонТУ. – Донецк, 2010 г. – С. 505-509.
Кожевников В.И. Автоматизированная система управления дорожным движением / В.И. Кожевников [и др.] // Вестник Самарского государственного университета. – Самара, 1995. – №. 1(6). – С. 110-118.
КОМКОН Traffic Control Equipment [Электронный ресурс] / КОМКОН НПП «Система + Сервис». Режим доступа http://komkon.ua/programs/tce.html (дата доступа 26.03.2012 г.).
Лукьяница А.А. Цифровая обработка видеоизображений / А.А. Лукьяница, А.Г. Шишкин. – М.: «Ай-Эс-Эс Пресс», 2009. – 518 с.
Система распознавания номеров и автоматической фото- и видеофиксации нарушений правил дорожного движения «VOCORD Traffic» [Электронный ресурс] / VOCORD Системы видеонаблюдения и аудиорегистрации. Режим доступа http://www.vocord.ru/218/ (дата доступа 26.03.2011 г.).
Состояние окружающей среды Республики Беларусь : нац. доклад / М-во природ. ресур. и окружающей среды Республики Беларусь, Гос. науч. учр-е «Инс-т природопользования Нац. академ. наук Беларуси» . – Минск : Белтаможсервис, 2010. – 150 с.
Что такое CUDA? [Электронный ресурс] / CUDA Zone nVidia. Режим доступа http://www.nvidia.ru/object/what_is_cuda_new_ru.html (дата обращения 01.15.2012 г.).
Ясинский Ф. Н. Распознавание большого количества образов при помощи нейронных сетей с использованием многопроцессорных систем / Ф. Н. Ясинский, А. С. Мочалов // Вестник Ивановского государственного энергетического университета. – Иваново, 2011. – № 2. – С. 85-87.




